Преобразование Хафа
[ вычисляет Стандартное Преобразование Хафа (SHT) бинарного изображения H,theta,rho]
= hough(BW)BW. hough функция предназначена для обнаружения линий. Функция использует параметрическое представление линии: rho = x*cos(theta) + y*sin(theta). Функция возвращается rho, расстояние от источника до линии вдоль вектора, перпендикулярного линии, и theta, угол в степенях между x -осью и этим вектором. Функция также возвращает SHT, H, которая является матрицей пространства параметров, строки и столбцы которой соответствуют rho и theta значениям соответственно. Для получения дополнительной информации см. «Алгоритмы».
Считайте изображение и преобразуйте его в полутоновое изображение.
RGB = imread('gantrycrane.png');
I = im2gray(RGB);Извлечение ребер.
BW = edge(I,'canny');Вычислите преобразование Хафа.
[H,T,R] = hough(BW,'RhoResolution',0.5,'Theta',-90:0.5:89);
Отобразите оригинальное изображение и матрицу Хафа.
subplot(2,1,1); imshow(RGB); title('gantrycrane.png'); subplot(2,1,2); imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Hough transform of gantrycrane.png'); xlabel('\theta'), ylabel('\rho'); axis on, axis normal, hold on; colormap(gca,hot);

Прочтите изображение и преобразуйте его в полутоновый.
RGB = imread('gantrycrane.png');
I = im2gray(RGB);Извлечение ребер.
BW = edge(I,'canny');Вычислите преобразование Хафа в ограниченной области значений углов.
[H,T,R] = hough(BW,'Theta',44:0.5:46);Отобразите преобразование Хафа.
figure imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Limited Theta Range Hough Transform of Gantrycrane Image'); xlabel('\theta') ylabel('\rho'); axis on, axis normal; colormap(gca,hot)

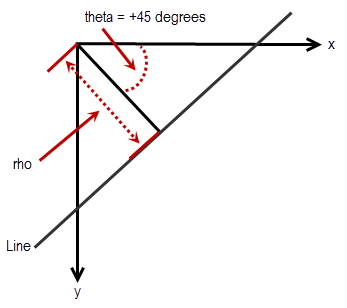
Стандартное преобразование Хафа (SHT) использует параметрическое представление линии:
rho = x*cos(theta) + y*sin(theta)
Переменная rho - это расстояние от источника до линии вдоль вектора, перпендикулярного линии. theta - угол перпендикулярной проекции от источника до линии, измеренный в степенях по часовой стрелке от положительной оси X. Диапазон теты составляет -90 ° ≤ Угол самой линии равен, 90 °, также измеренный по часовой стрелке относительно положительной оси X.
SHT является матрицей пространства параметров, строки и столбцы которой соответствуют значениям rho и theta соответственно. Элементы в SHT представляют камеры. Первоначально значение в каждой камере равняется нулю. Затем для каждой нефонной точки в изображении rho вычисляется для каждой theta. rho округлится до ближайшей допустимой строки в SHT. Эта камера аккумулятора увеличена. В конце этой процедуры значение Q в SHT (r, c) означает, что Q-точки в xy-плоскости лежат на линии, заданной theta (c) и rho (r). Пиковые значения в SHT представляют потенциальные линии в вход изображении.
Матрица преобразования Хафа, H, is nrho-by-ntheta где:
nrho = 2*(ceil(D/RhoResolution)) + 1, и
D = sqrt((numRowsInBW - 1)^2 + (numColsInBW - 1)^2).
rho значения варьируются от -diagonal на diagonal, где
diagonal = RhoResolution*ceil(D/RhoResolution).
ntheta = length(theta)
