Навигация - это процесс планирования, записи и управления перемещением судна или транспортного средства из одного места в другое. Слово происходит от латинских корней navis («корабль») и agere («двигаться или направлять»). Географическая информация - обычно в виде широт и долгот - лежит в основе навигационной практики. Тулбокс включает специализированные функции для навигации по пространствам земного шара, для которых проективные координаты имеют ограниченное применение.
Навигация по суше, по воде и по воздуху может включать в себя различные задачи:
Установление положения, использование известных фиксированных ориентиров (пилотирование)
Использование звезд, Солнца и Луны (небесная навигация)
Использование технологии для фиксации позиций (инерционное наведение, радиомаяки и спутниковая навигация, включая GPS)
Вывод движения нетто из прошлого известного положения (мертвое исчисление)
Другая навигационная задача включает планирование рейса или полета, которое включает в себя определение эффективного маршрута (обычно с большим приближением круга), избегание погоды (оптимальная трассировка пути) и изложение плана предполагаемого движения (прокладка пути). Функции Mapping Toolbox™ также поддерживают эти навигационные действия.
Можно использовать и преобразовать между несколькими угловыми и дистанционными модулями измерения. Функции навигационной поддержки:
dreckon
gcwaypts
legs
navfix
Чтобы облегчить использование этих функций и соответствовать общей навигационной практике, только для этих конкретных функций используются определенные конвенции:
Углы всегда в степенях.
Расстояния всегда в морских милях.
Скорость всегда в узлах (морские мили в час).
Связанные функции, которые не несут этого ограничения, включают rhxrh, scxsc, gcxgc, gcxsc, track, timezone, и crossfix, из-за их потенциала для применения вне навигации.
Формат навигационной дорожки требует переменных вектор-столбец для широт и долгот путевых точек дорожки. Путевая точка - это точка, через которую проходит дорожка, обычно соответствующая изменению курса (или скорости). Навигационные дорожки состоят из сегментов линии, соединяющих эти путевые точки, которые называются ногами. В этом формате, поэтому, n ветвей описаны с помощью n + 1 путевых точек, потому что конечная точка для конечной ветви должна быть задана. Навигационные функции Mapping Toolbox всегда предполагают, углы модулей всегда приведены в степенях.
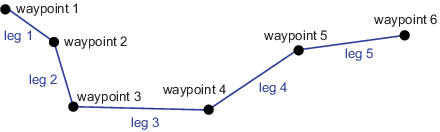
Здесь для пяти дорожек требуется шесть путевых точек. В формате навигационной дорожки путевые точки представлены двумя векторами 6 на 1, одним для широт и одним для долгот.
