Идентифицируйте координаты осей
[ позволяет идентифицировать координаты x,y] = ginput(n)n точки в Декартовых, полярных или географических осях. Чтобы выбрать точку, переместите курсор в нужное место и нажмите кнопку мыши или клавишу на клавиатуре. Нажмите клавишу Return, чтобы остановить перед всеми n выбираются точки. MATLAB® возвращает координаты выбранных точек. Если осей нет, вызов ginput создает объект Декартовых осей.
Определите четыре точки в наборе осей, используя ginput. Чтобы выбрать каждую точку, переместите курсор в нужное место и нажмите кнопку мыши или клавишу.
[x,y] = ginput(4)
x =
0.3699
0.4425
0.5450
0.6130
y =
0.6690
0.5605
0.4719
0.6025Постройте график точек.
plot(x,y);
Определите пять координат в наборе осей, используя ginput. Чтобы выбрать каждую точку, переместите курсор в нужное место и нажмите кнопку мыши, строчную букву, заглавную букву, число или пробел. Верните кнопки мыши или ASCII-номера клавиш, используемых для выбора каждой точки.
[x,y,button] = ginput(5); button
button =
3
104
32
51
82В этом случае координаты идентифицировали с помощью правой кнопки мыши (3), строчной буквы h (104), пробела (32), числа 3 (51) и верхней буквы R (82).
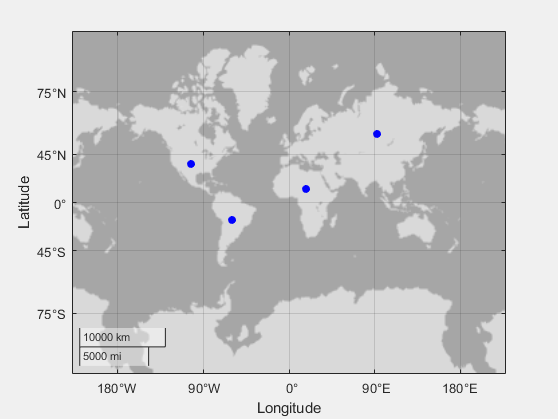
Создайте географические оси и идентифицируйте координаты широты и долготы четырех точек. Затем постройте график точек, которые вы идентифицируете.
geoaxes [lat,lon] = ginput(4);
Используйте hold on команду и geolimits функция для поддержания пределов карты. Постройте график идентифицированных точек.
hold on geolimits('manual') geoscatter(lat,lon,'filled','b')