Обновите параметры конфигурации для Simulink® модель, которую вы создаете, перед симуляцией или развертыванием модели на контроллере.
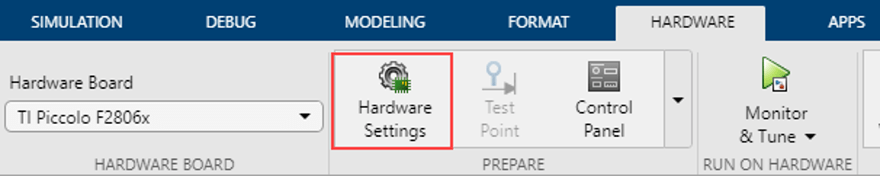
В окне Simulink щелкните Hardware Settings на вкладке HARDWARE, чтобы открыть диалоговое окно Параметров конфигурации и выбрать целевой компьютер в поле Hardware board.
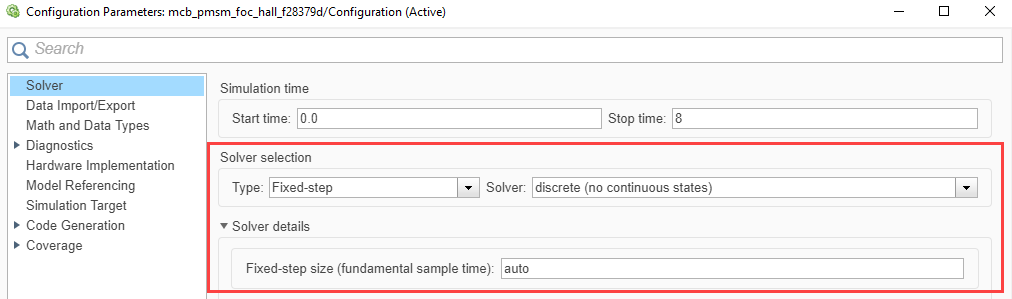
На вкладке Solver диалогового окна Параметров конфигурации для дискретного решателя с фиксированным шагом введите auto в поле Fixed-step size (fundamental sample time).
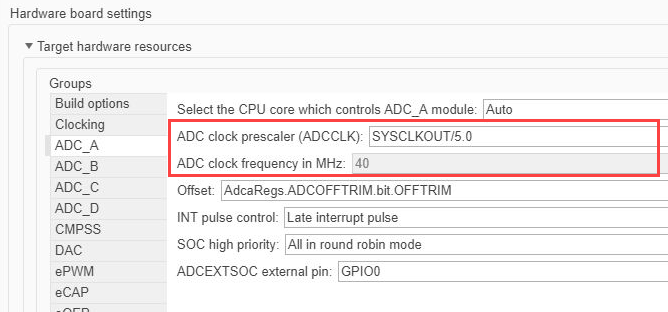
Если вы соединяете аналоговые входы (датчики тока или напряжения) с платой оборудования, сконфигурируйте соответствующие параметры АЦП в диалоговом окне Параметров конфигурации с помощью следующих шагов:
Откройте вкладку Hardware Implementation.
Установите прескалер синхроимпульса АЦП и проверьте тактовую частоту АЦП. Убедитесь, что отображаемая тактовая частота АЦП меньше максимального значения, заданного в таблицах данных устройства.
Этот пример показывает строение АЦП для LAUNCHXL-F28379D платы. Максимальная рабочая частота ADCCLK для TMS320F28379D целей составляет 50 МГц.
Если вы соединяете выходы PWM с целевого устройства к инвертору, сконфигурируйте соответствующие параметры PWM в диалоговом окне Параметров конфигурации с помощью следующих шагов:
Откройте вкладку Hardware Implementation.
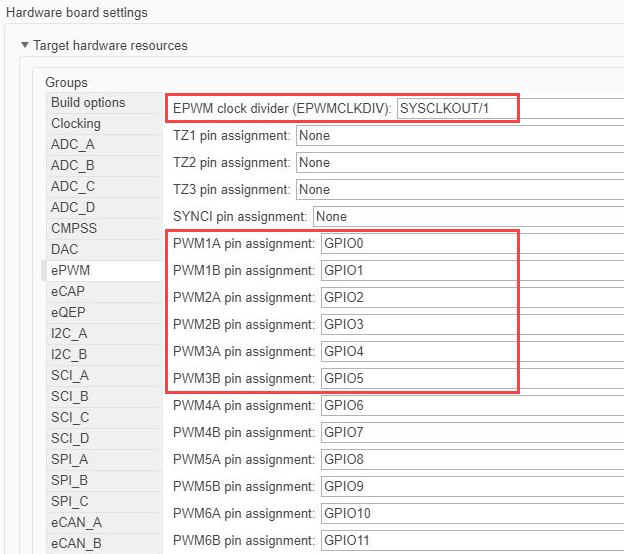
Установите разделитель синхроимпульса ePWM на SYSCLKOUT/1.
Обновите следующие поля назначения контактов ШИМ.
| Настройки контактов ePWM | Свойство |
|---|---|
PWM1A pin assignment | Импульс управления ключами для высокоскоростного транзистора фазы А |
PWM1B pin assignment | Импульс управления ключами для фазового транзистора с низкой стороной |
PWM2A pin assignment | Импульс управления ключами для высокоскоростного транзистора фазы B |
PWM2B pin assignment | Импульс управления ключами для низкоскоростного транзистора фазы B |
PWM3A pin assignment | Импульс управления ключами для высокоскоростного транзистора фазы С |
PWM3B pin assignment | Импульс управления ключами для низкоскоростного транзистора фазы С |
Если вы соединяете датчик Холла с аппаратной платой, сконфигурируйте соответствующие параметры в диалоговом окне Параметры конфигурации (Configuration Parameters) с помощью следующих шагов:
Откройте вкладку Hardware Implementation.
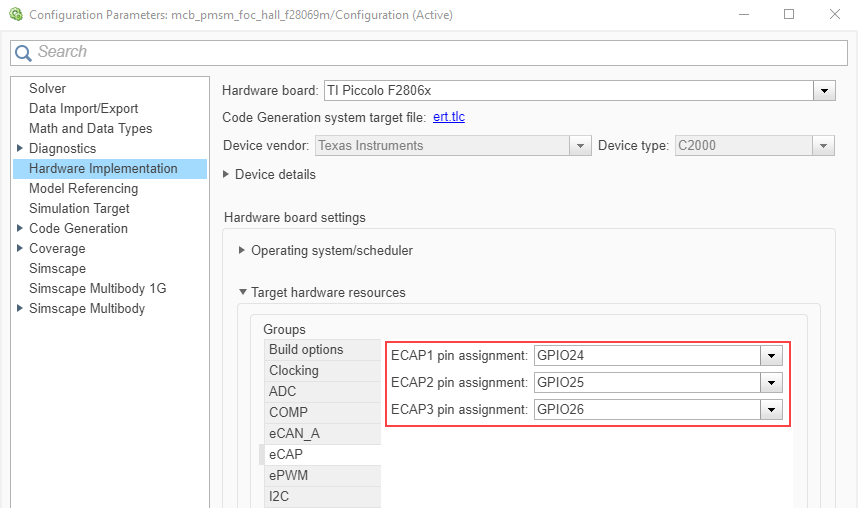
Выберите группу eCAP в разделе Hardware board settings > Target hardware resources.
Обновите следующие поля назначения контактов ECAP:
| Поле назначения контактов ECAP | Значение поля |
|---|---|
| Зал А |
| Зал B |
| Зал C |
В следующем примере показано строение eCAP для датчика Hall, подключенного к DRV8312 плате с F28069 платой управления MCU Piccolo:
Если вы соединяете датчик квадратурного энкодера с аппаратной платой, сконфигурируйте соответствующие параметры в диалоговом окне Параметры конфигурации (Configuration Parameters) следующими шагами:
Откройте вкладку Hardware Implementation.
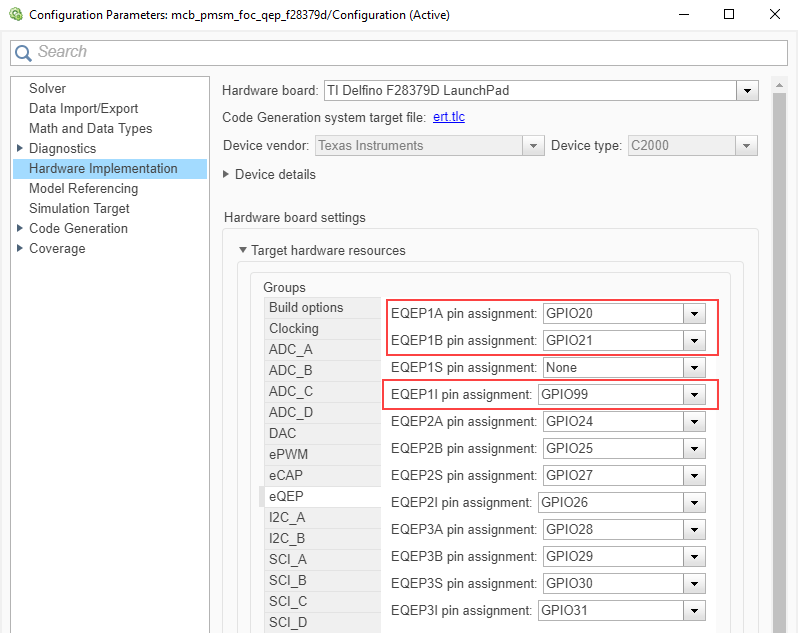
Выберите группу eQEP в разделе Hardware board settings > Target hardware resources.
Обновите следующие поля назначения контактов EQEP:
| Поле назначения контактов EQEP | Свойство |
|---|---|
| Квадратурный канал A энкодера |
| Канал квадратурного энкодера B |
| Индекс квадратурного энкодера |
В следующем примере показано строение eQEP для квадратурного датчика энкодера, подключенного к LAUNCHXL-F28379D плате:
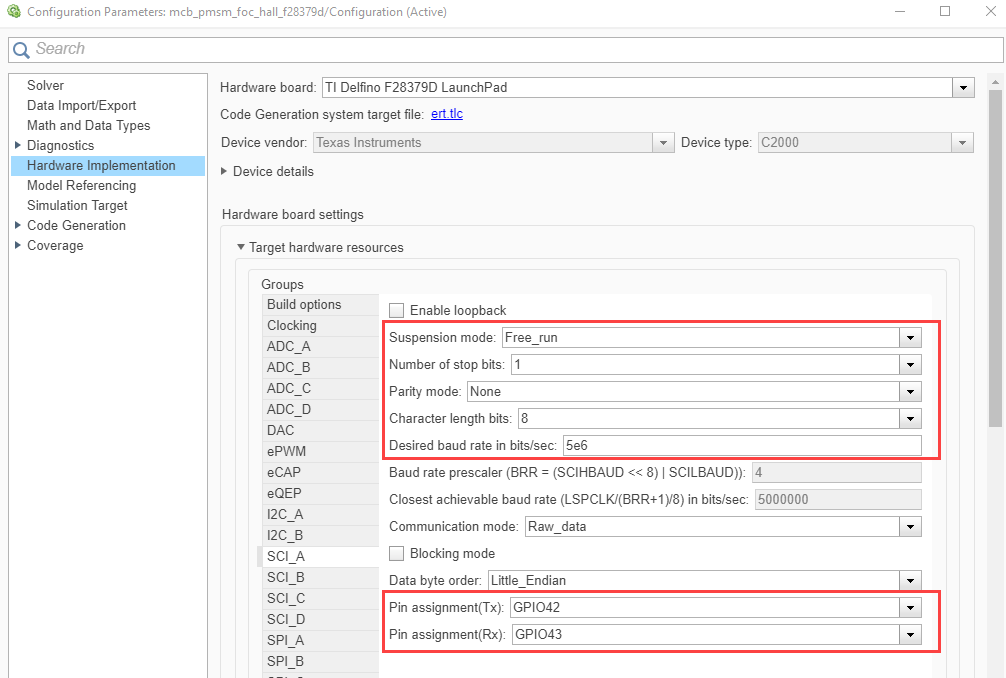
Если вы генерируете код и используете последовательную связь между моделями host и target Simulink, сконфигурируйте соответствующие параметры в диалоговом окне Параметры конфигурации (Configuration Parameters) с помощью следующих шагов:
Откройте вкладку Hardware Implementation.
Выберите группу SCI_A в разделе Hardware board settings > Target hardware resources.
Обновите следующие настройки SCI_A:
| SCI_A настройки | Свойство |
|---|---|
Suspension mode | Режим последовательной подвески |
Number of stop bits | Стоп-биты |
Parity mode | Паритет |
Character length bits | Биты данных |
Desired baud rate in bits/sec | Скорость последовательной связи в бодах |
| Выходной контакт для последовательной передачи |
| Входной контакт для последовательного приема |
Например, используйте следующее строение SCI_A для датчика Hall, подключенного к F28379D плате LaunchPad: