Motor Control Blockset™ обеспечивает Simulink® блоки для создания и настройки векторного управления и других алгоритмов для бесщеточных двигателей. Блоки включают преобразования Парка и Кларка, бездатчиковые наблюдатели, ослабление поля, генератора векторной ШИМ и автотунер FOC. Можно проверить алгоритмы управления в симуляции с обратной связью с помощью моделей двигателя и инвертора, включенных в библиотеку.
Инструмент оценки параметра blockset запускает предопределенные тесты на оборудовании вашего двигателя для точной оценки сопротивления статора, индуктивности d оси и q оси, обратного ЭДС, инерции и трения. Можно включить эти значения параметров двигателя в симуляцию с обратной связью, чтобы проанализировать проектирование контроллера.
Справочные примеры показывают, как проверить алгоритмы управления в симуляции рабочего стола и сгенерировать компактный код С, который поддерживает скорости выполнения, необходимые для производственной реализации. Примеры ссылки могут также использоваться, чтобы реализовать алгоритмы для наборов оборудования управления двигателем, поддерживаемых библиотекой.
Этот пример использует регулирование без разомкнутого контура (также известное как скалярное управление или В/Гц управление), чтобы запустить двигатель.
Оцените параметры двигателя с помощью функции оценки параметра в Motor Control Blockset.
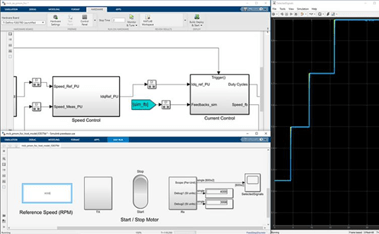
Выполните настройку параметров управления для подсистем управления скоростью и крутящим моментом.
Подключите двигатели, датчики и источник степени к аппаратным платам.
Сконфигурируйте модель Simulink для взаимодействия с поддерживаемым целевым компьютером.
Разомкнутый контур и замкнутой системами
Описывает регулирование разомкнутого контура, с обратной связью и переход от управления с разомкнутого контура к управлению с обратной связью.
Реализуйте регулирование скорости для PMSM и асинхронного двигателя с помощью векторного управления.
Реализуйте регулирование скорости для двигателя BLDC с помощью шестиступенчатой коммутации.
Описывает модель хоста, целевую модель и то, как они общаются.
Калибровка смещения и положения датчика АЦП датчика тока
Описывает смещения для датчика Холла, квадратурного энкодера и ADC датчика тока.
Система в относительных единицах
Определяет нормированную единичную систему при помощи базовых значений.