Motor Control Blockset™ поддерживает следующие аппаратные строения:
F28069 строения платы управления
LAUNCHXL-F28069M строения
LAUNCHXL-F28379D строения
C2000 MCU Resolver Eval Kit [R2]
Это строение включает в себя следующие оборудованию компоненты:
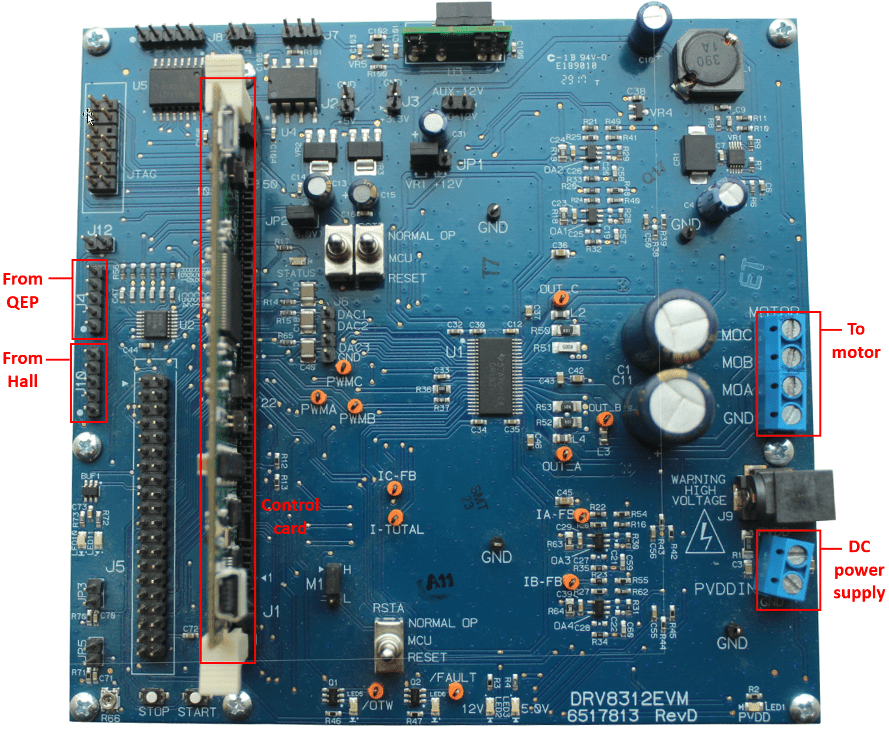
Плата Instruments™ DRV8312-69M-KIT инвертора Техаса
Контрольная карта F28069 микроконтроллера Texas Instruments
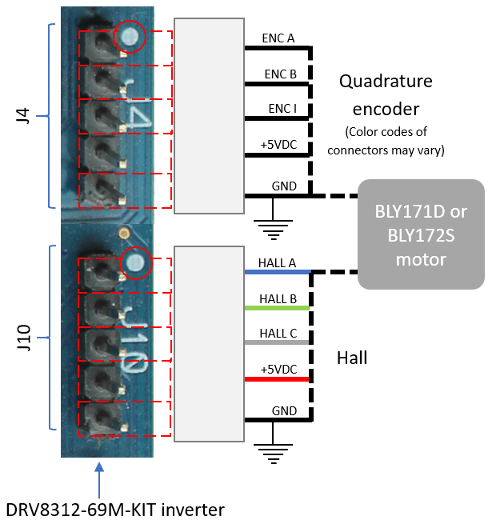
Мотор BLY171D (поддерживает как датчики Холла, так и квадратурные датчики энкодера)
Мотор BLY172S (поддерживает датчик Холла)
Квадратурный энкодер
Степень постоянного тока
Примечание
Из-за проблем оборудования подачи вспомогательных степеней, DRV8312-69M-KIT не поддерживает датчики положения, соединенные с некоторыми двигателями (для примера, Teknic M-2310P motor).
Следующие шаги описывают аппаратные соединения для строения платы управления F28069:
Подключите плату управления F28069 к J1 платы DRV8312-69M-KIT инвертора.
Соедините три фазы двигателя с MOA, MOB и MOC на плате инвертора.
Подключите источник степени постоянного тока (24V) к PVDDIN на плате инвертора.
Предупреждение
Будьте осторожны при соединении PVDD и GND к положительным и отрицательным клеммам источника степени постоянного тока. Противоположное подключение может повредить аппаратные компоненты.
Следующий шаг описывает интерфейс квадратурного датчика энкодера:
Соедините контакты квадратурного энкодера (G, I, A, 5V, B) с J4 на плате инвертора.
Для реализации измерения положения с помощью датчика Холла используйте двигатель, который имеет встроенные датчики Холла (для примера, BLY171D и BLY172S). Следующие шаги описывают шаги для взаимодействия с датчиком Холла:
Подключите выход датчика энкодера Холла к J10 на плате инвертора.
Мы рекомендуем следующие настройки перемычки для платы DRV8312-69M-KIT инвертора при работе с Motor Control Blockset. Эти параметры можно настроить в зависимости от требований приложения. Для получения дополнительной информации об этих настройках смотрите руководство пользователя устройства, доступное на веб-сайте Instruments Техаса.
JP1 – VR1
JP2 - ВКЛ.
JP3 - OFF
JP4 - OFF
JP5 - OFF
M1 - H
J2 - OFF
J3 - OFF
RSTA - MCU
RSTB - MCU
RSTC - MCU
LAUNCHXL-F28069M строения включает следующие оборудованию компоненты:
LAUNCHXL-F28069M контроллер
BOOSTXL-DRV8305 (поддерживаемый инвертор)
Teknic motor M-2310P (поддерживает как датчики Холла, так и квадратурные датчики энкодера)
Мотор BLY171D (поддерживает как датчики Холла, так и квадратурные датчики энкодера)
Мотор BLY172S (поддерживает датчик Холла)
Степень постоянного тока
LAUNCHXL-F28379D строения включает следующие оборудованию компоненты:
LAUNCHXL-F28379D контроллер
BOOSTXL-DRV8305 и BOOSTXL-3PHGANINV (поддерживаемые инверторы)
Teknic motor M-2310P (поддерживает как датчики Холла, так и квадратурные датчики энкодера)
Мотор BLY171D (поддерживает как датчики Холла, так и квадратурные датчики энкодера)
Мотор BLY172S (поддерживает датчик Холла)
Степень постоянного тока
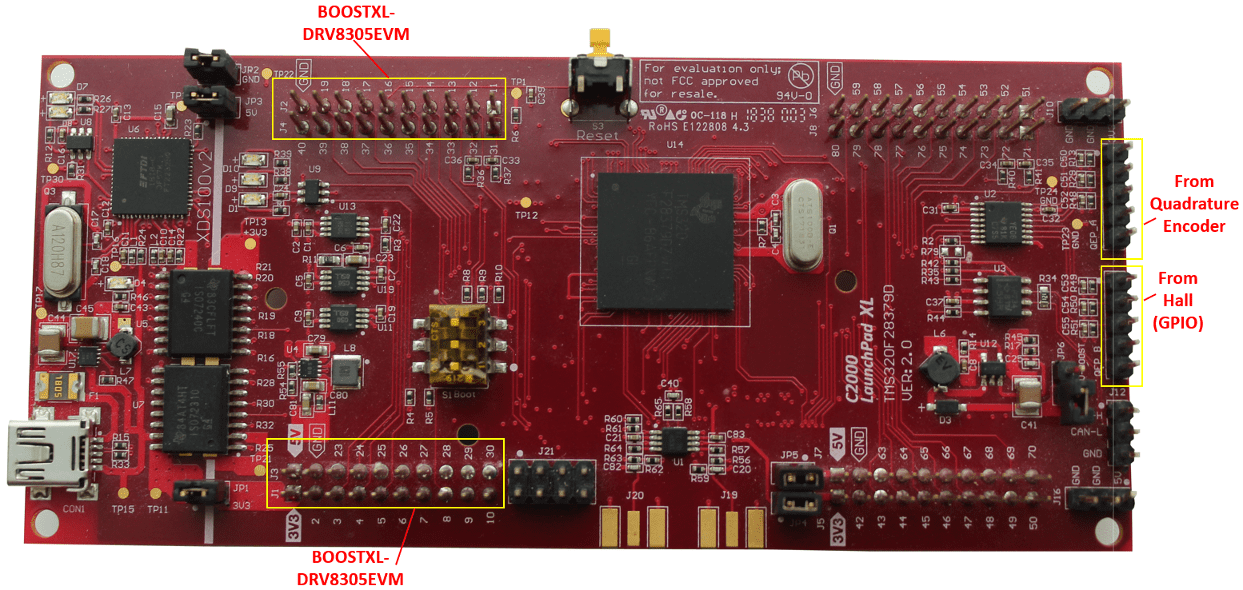
Следующие шаги описывают аппаратные подключения для LAUNCHXL-F28069M и LAUNCHXL-F28379D строений:
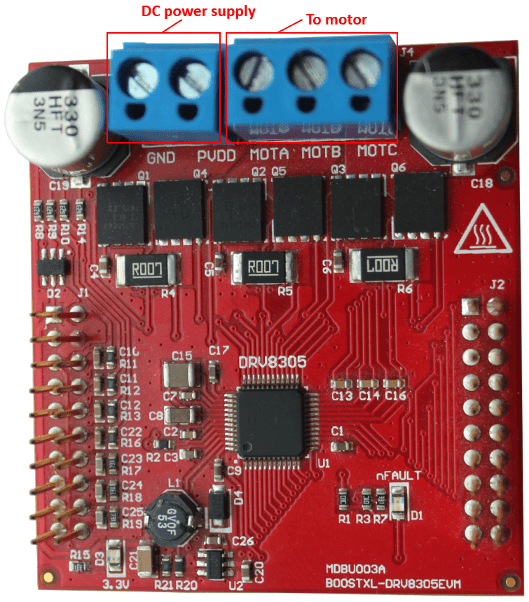
Приложите доску инвертора BOOSTXL к J1, J2, J3, J4 на плате контроллера LAUNCHXL.
Примечание
Подключите плату инвертора к плате контроллера таким образом, чтобы J2 J1 BOOSTXL совпали с J1 J2 LAUNCHXL.
Подключите двигатель с тремя фазами к MOTA, MOTB и MOTC на плате инвертора BOOSTXL.
Подключите источник степени постоянного тока (24V) к PVDD и GND на плате инвертора BOOSTXL.
Предупреждение
Будьте осторожны при соединении PVDD и GND к положительным и отрицательным клеммам источника степени постоянного тока. Противоположное подключение может повредить аппаратные компоненты.
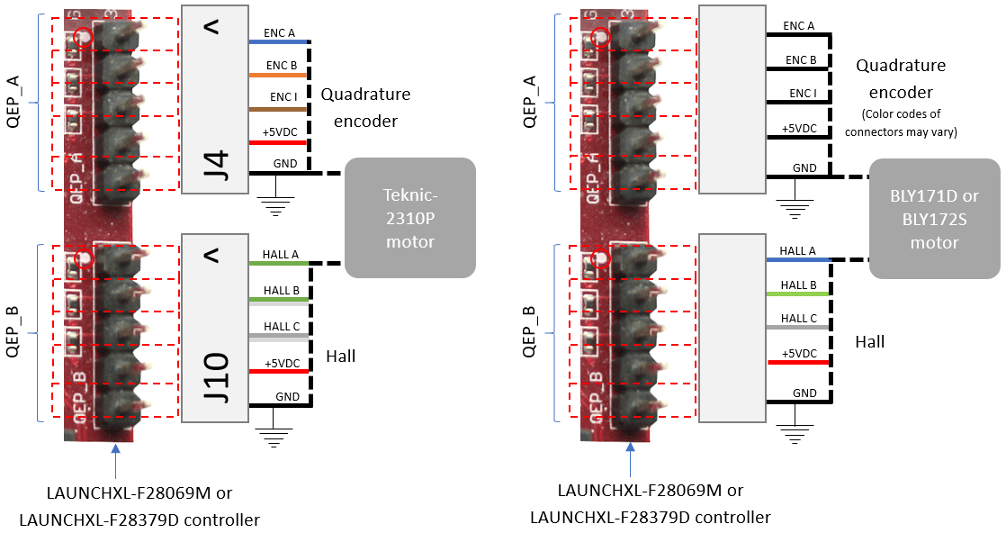
Следующий шаг описывает интерфейс квадратурного датчика энкодера:
Подключите контакты квадратурного энкодера (G, I, A, 5V, B) к QEP_A на плате контроллера LAUNCHXL.
Для реализации измерения положения с помощью датчика Холла используйте двигатель, который имеет встроенные датчики Холла (для примера, Teknic motor M-2310P, BLY171D и BLY172S). Следующие шаги описывают шаги для взаимодействия с датчиком Холла:
Подключите выход датчика энкодера Холла к порту GPIO, который сконфигурирован как eCAP, на плате контроллера LAUNCHXL.
Мы рекомендуем следующие настройки перемычек для плат инвертора LAUNCHXL при работе с Motor Control Blockset. Эти параметры можно настроить в зависимости от требований приложения. Для получения дополнительной информации об этих настройках смотрите руководство пользователя устройства, доступное на веб-сайте Instruments Техаса.
Для LAUNCHXL-F28069M контроллера
JP1 - ВКЛ.
JP2 - ВКЛ.
JP3 - ВКЛ.
JP4 - ВКЛ.
JP5 - ВКЛ.
JP6 - OFF
JP7 - ВКЛ.
Для LAUNCHXL-F28379D контроллера
JP1 - ВКЛ.
JP2 - ВКЛ.
JP3 - ВКЛ.
JP4 - ВКЛ.
JP5 - ВКЛ.
JP6 - OFF
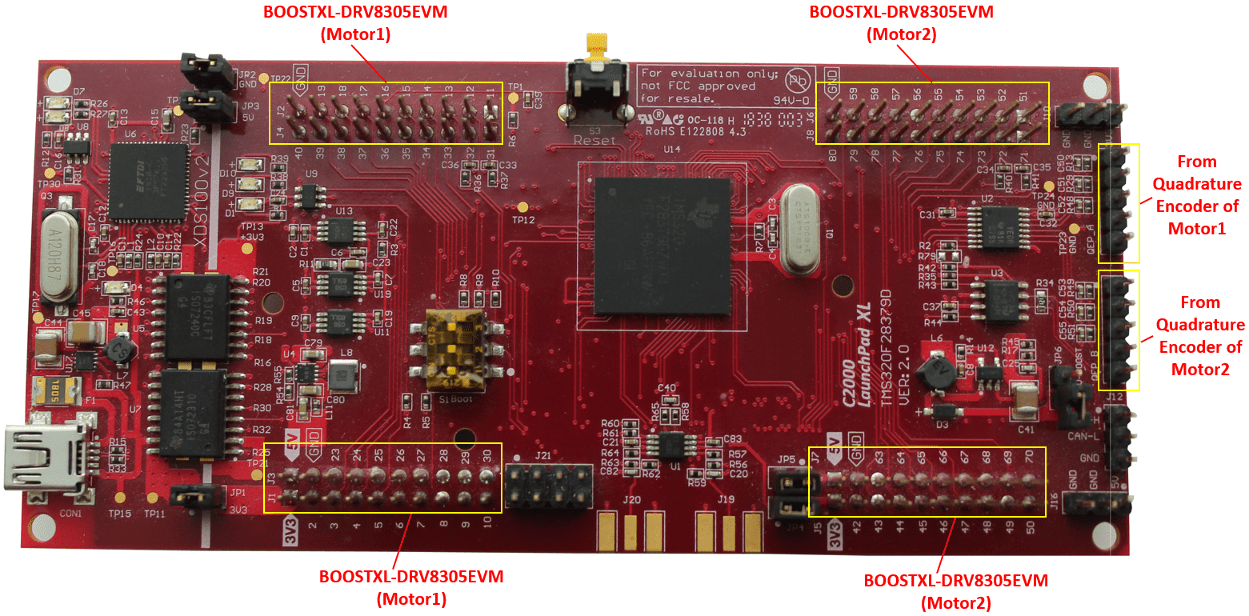
Подключите три фазы Motor1 и Motor2 к MOTA, MOTB и MOTC на соответствующих платах инвертора BOOSTXL.
Приложите доску инвертора BOOSTXL (связанный с Motor1) к J1, J2, J3, J4 на плате контроллера LAUNCHXL.
Примечание
Подключите плату инвертора к плате контроллера таким образом, чтобы J2 J1 BOOSTXL совпали с J1 J2 LAUNCHXL.
Приложите доску инвертора BOOSTXL (связанный с Motor2) к J5, J6, J7, J8 на плате контроллера LAUNCHXL.
Примечание
Подключите плату инвертора к плате контроллера таким образом, чтобы J2 J1 BOOSTXL совпали с J5 J6 LAUNCHXL.
Подключите источник степени постоянного тока (24V) к PVDD и GND на обеих платах инвертора BOOSTXL.
Примечание
Подключите PVDD и GND на платах BOOSTXL (для MOTOR1 и MOTOR2) к одному блоку степени. Когда один двигатель потребляет степень, второй двигатель генерирует степень. Если вы соединяете оба двигателя с одним и тем же источником степени, степень, произведенная одним двигателем, потребляется другим двигателем. Источник степени постоянного тока обеспечивает степень только для потерь.
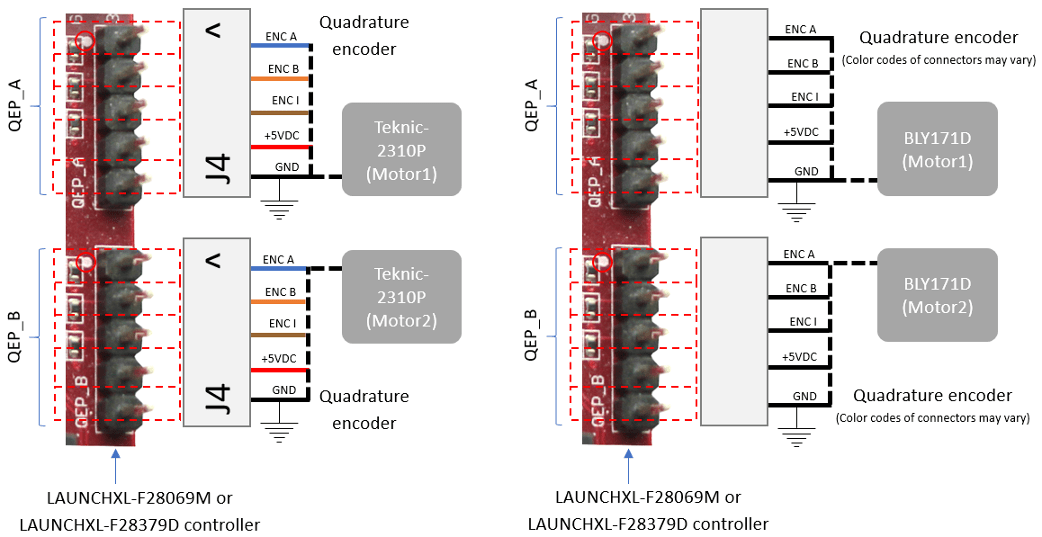
Соедините контакты квадратурного энкодера Motor1 (G, I, A, 5V, B) с QEP_A на плате контроллера LAUNCHXL.
Соедините контакты квадратурного энкодера Motor2 (G, I, A, 5V, B) с QEP_B на плате контроллера LAUNCHXL.
Предупреждение
Будьте осторожны при соединении PVDD и GND к положительным и отрицательным клеммам источника степени постоянного тока. Противоположное подключение может повредить аппаратные компоненты.
TMDSRSLVR C2000 Resolver to Digital Conversion Kit строения включает следующие оборудованию компоненты:
LAUNCHXL-F28069M контроллер
BOOSTXL-DRV8305 (поддерживаемый инвертор)
Степень постоянного тока
Решатель C2000 TMDSRSLVR в комплект для цифрового преобразования (Resolver Eval Kit [R2])
Энкодер решателя
Следующие шаги описывают аппаратные подключения для платы TMDSRSLVR:
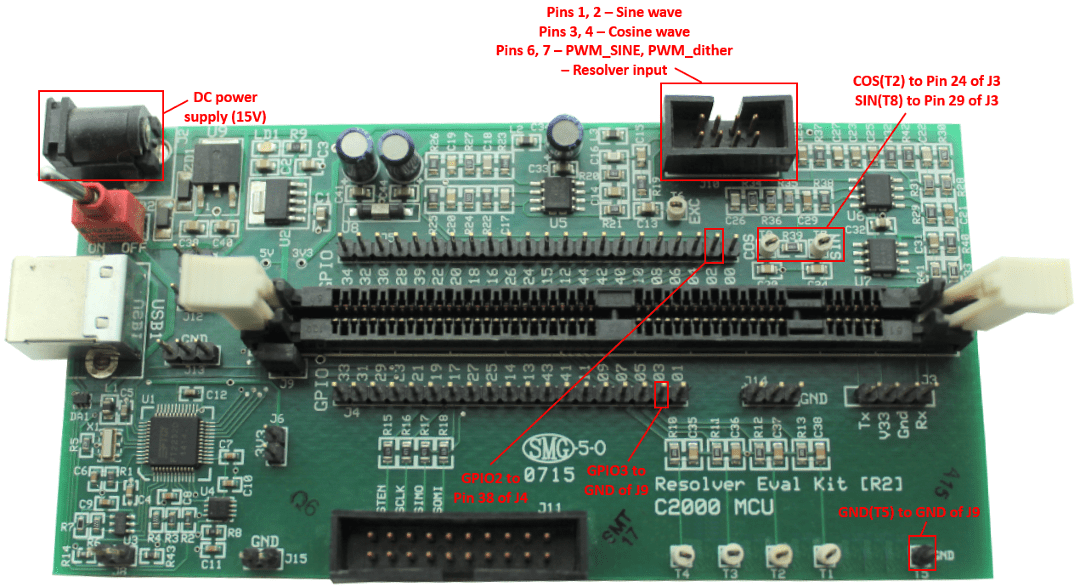
Подключите источник степени постоянного тока (15V) к J2 на плате TMDSRSLVR.
Подключите выходные контакты решателя для синусоиды к контактам 1, 2 J10 на плате TMDSRSLVR.
Соедините выходные контакты решателя для волны косинуса с контактами 3, 4 J10 на плате TMDSRSLVR.
Подключите входные контакты решателя к PWM_dither и PWM_SINE контактам J10 на плате TMDSRSLVR.
Следующий шаг описывает аппаратное подключение для платы LAUNCHXL-F28069M контроллера:
Подключите плату LAUNCHXL-F28069M контроллера к компьютеру через порт USB.
Следующие шаги описывают аппаратные соединения между платами MCU Resolver Eval Kit [R2] и LAUNCHXL-F28069M контроллерами:
Подключите контакт COS (T2) на плате TMDSRSLVR к контакту 24 J3 на плате LAUNCHXL-F28069M контроллера.
Подключите контакт SIN (T8) на плате TMDSRSLVR к контакту 29 J3 на плате LAUNCHXL-F28069M контроллера.
Подключите контакт GPIO2 на плате TMDSRSLVR к контакту 38 J4 на плате LAUNCHXL-F28069M контроллера.