В этом разделе описываются методы управления разомкнутым контуром и с обратным циклом.
Разомкнутый контур (также известное как скалярное управление или В/Гц управление) является популярным методом управления двигателем, который можно использовать, чтобы запустить любой двигатель переменного тока. Это простой метод, который не нуждается в обратной связи от двигателя. Чтобы сохранить магнитный поток статора постоянным, мы сохраняем амплитуду напряжения питания пропорциональной ее частоте.
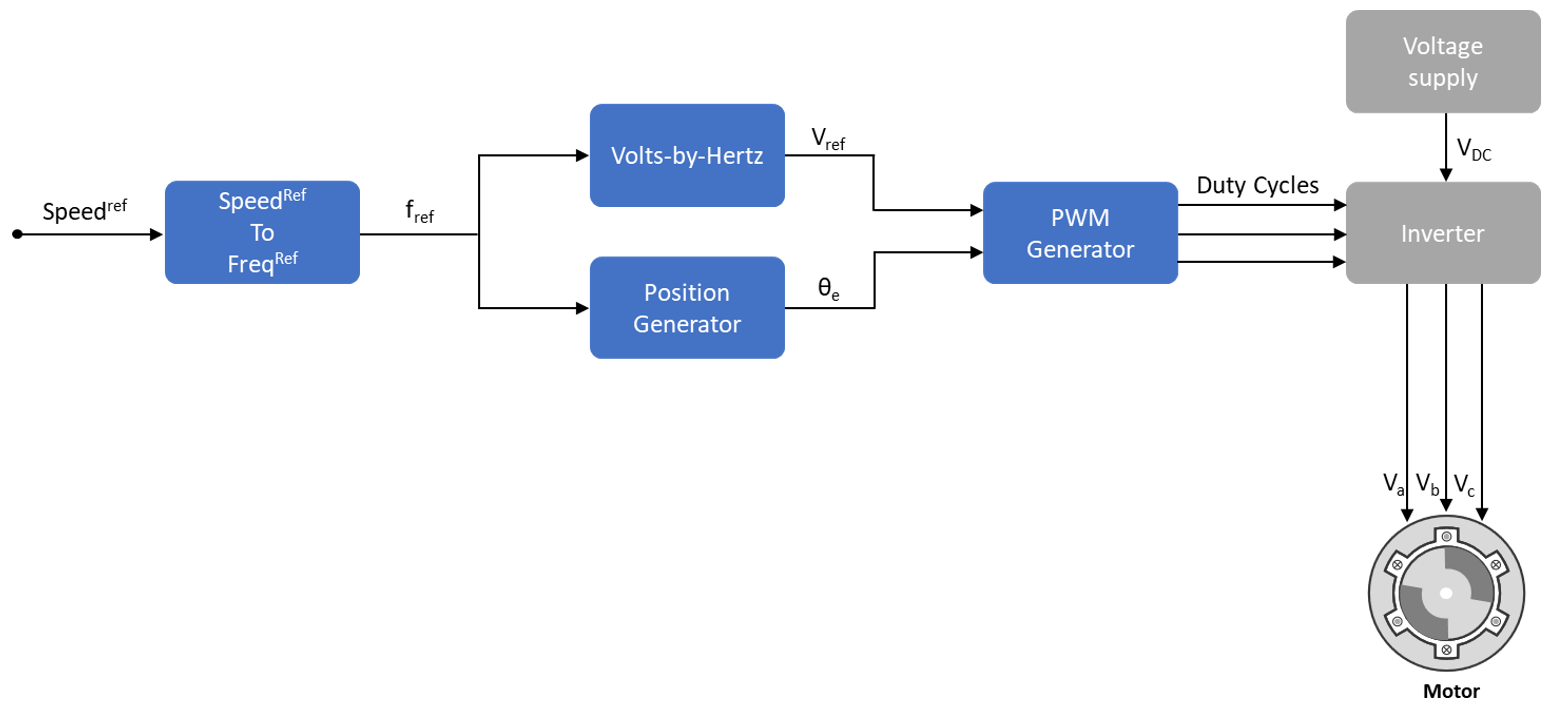
Этот рисунок показывает систему управления без разомкнутого контура. Схема степени состоит из инвертора напряжения ШИМ, питаемого источником постоянного тока. Система не использует никаких сигналов обратной связи для реализации управления. Он использует задающую скорость, чтобы определить частоту напряжений статора. Система вычисляет величину напряжения как пропорциональную отношению номинального напряжения и номинальной частоты (обычно известное как Отношение В/Гц), так что поток остается постоянным.
где:
- номинальный поток двигателя в Wb.
- напряжение статора электродвигателя переменного тока в вольтах.
- частота напряжения статора электродвигателя переменного тока в Гц.
В системе без разомкнутого контура скорость для двигателя переменного тока выражается как:
где:
- механическая скорость двигателя переменного тока в об/мин.
- частота напряжения статора и токов двигателя переменного тока в Гц.
- количество пар полюсов двигателя.
Можно использовать предыдущее выражение, чтобы определить частоту ссылки напряжений для необходимой скорости (для заданной машины).
Используйте эту частоту для генерации опорных напряжений ШИМ для инвертора. Вычислите величину напряжений путем поддержания отношения В/Гц как:
При использовании представления системы в относительных единицах система управления без разомкнутого контура рассматривает Vrated как базовое количество, которое обычно соответствует 1PU или 100% коэффициенту заполнения. В зависимости от метода модуляции (Sinusoidal PWM или Space Vector PWM), вам может потребоваться дополнительное усиление ( для синусоидального ШИМ). На более низких скоростях системе нужно минимальное напряжение наддува (15% или 25% от номинального напряжения), чтобы преодолеть эффект падения напряжения сопротивления статора.
Вы можете использовать регулирование без разомкнутого контура в приложениях, где динамический ответ не является проблемой, и требуется экономически эффективное решение. Регулирование двигателя без разомкнутого контура не имеет возможности учитывать внешние условия, которые могут повлиять на скорость двигателя. Поэтому система управления не может автоматически исправить отклонение между желаемой и фактической скоростями двигателя.
Примечание
Реализация скалярного управления не рассматривает компенсацию падения напряжения из-за сопротивления статора и ослабления поля.
Управление с обратной связью принимает обратную связь системы в фактор для управления. Управление двигателем с обратной связью рассматривает обратную связь сигналов двигателя, подобных току и положению. Система управления использует сигналы обратной связи, чтобы регулировать напряжение (приложенное к двигателю), чтобы сохранить ответ двигателя на ссылку значении.
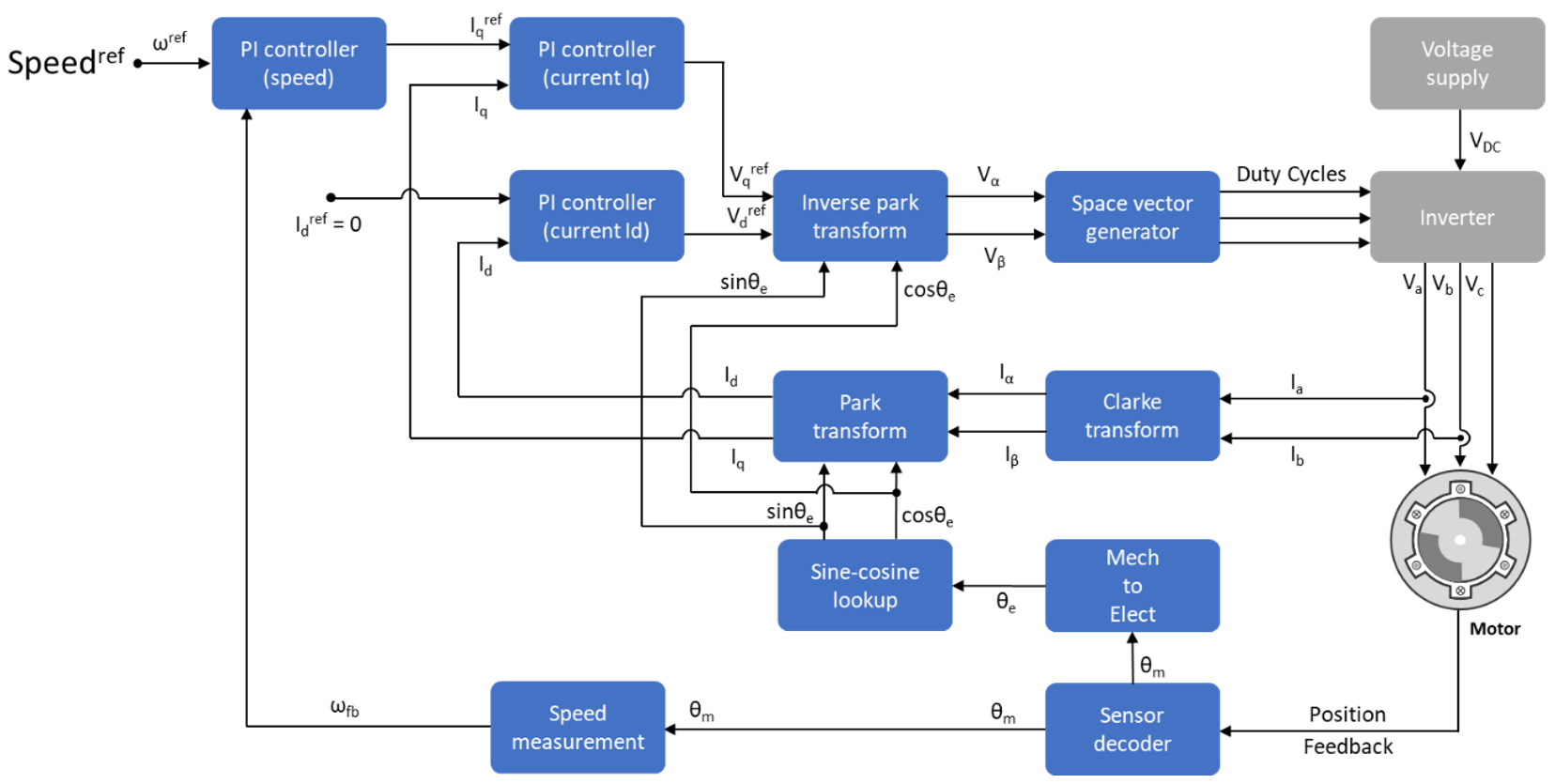
Векторное Управление (FOC) (или векторное управление) является популярной системой с обратной связью, которая используется в приложениях управления двигателем. Метод FOC используется для реализации крутящего момента, скорости и управления положением двигателей с обратной связью. Этот метод также обеспечивает хорошую управляемость в полном крутящем моменте и областях значений скоростей. Реализация FOC нуждается в преобразовании токов статора от стационарной системы координат к системе координат потока ротора.
Регулирование скорости и регулирование крутящего момента являются обычно используемыми режимами управления в FOC. Режим управления положением используется реже. В большинстве приложений тяги используется режим регулирования крутящего момента, в котором система управления двигателем следует эталонному значению крутящего момента. В режиме регулировки скорости контроллер двигателя следует задающей скорости значения и генерирует ссылку крутящего момента для управления крутящим моментом, который образует внутреннюю подсистему. В то время как в режиме управления положением контроллер скорости формирует внутреннюю подсистему.
Вам нужна обратная связь в реальном времени тока и положения ротора, чтобы реализовать алгоритм FOC. Можно использовать датчики для измерения тока и положения ротора. Можно также использовать бездатчиковые методы, которые используют предполагаемые значения обратной связи вместо фактических основанных на датчике измерений.
Управление с обратной связью использует положение в реальном времени и обратную связь тока статора, чтобы настроить контроллер скорости и токовый контроллер и изменить коэффициенты заполнения инвертора. Это гарантирует, что исправленный трехфазный источник напряжения (который запускает двигатель) корректирует отклонение обратной связи от желаемого значения.
Некоторые приложения требуют, чтобы двигатель начал использовать регулирование без разомкнутого контура. Когда двигатель достигает минимальной необходимой устойчивости в регулировании без разомкнутого контура, система управления переключается на систему с обратной связью.
В системе измерения положения на основе квадратурного энкодера двигатель запускается в разомкнутом контуре и переходит к системе с обратной связью, когда детектируется сигнал индекса.
При бездатчиковом способе управления положением двигатель начинает вращаться на 10% от номинальной скорости в разомкнутом контуре. После того, как ссылка превышает 10% от номинальной скорости, система управления переходит от разомкнутого контура к системе с обратной связью.
Чтобы гарантировать плавность перехода от разомкнутого контура к системе с обратной связью, ПИ-контроллеры сбрасывается и начинается с того же начального условия, как разомкнутый контур выходов.
