В этом разделе объясняется, как оценить точность модели объекта (двигатель и инвертор) физического двигателя и нагрузки, соединенной с двигателем. Вы должны подтвердить модель объекта управления и проверить, что результаты близки к измерениям физической системы, прежде чем использовать модель объекта для реализации усовершенствованных алгоритмов. Можно подтвердить систему путем сравнения переходной характеристики регулировки скорости и регулирования тока в симуляции и в целевых компьютерах, соединенных с двигателем.
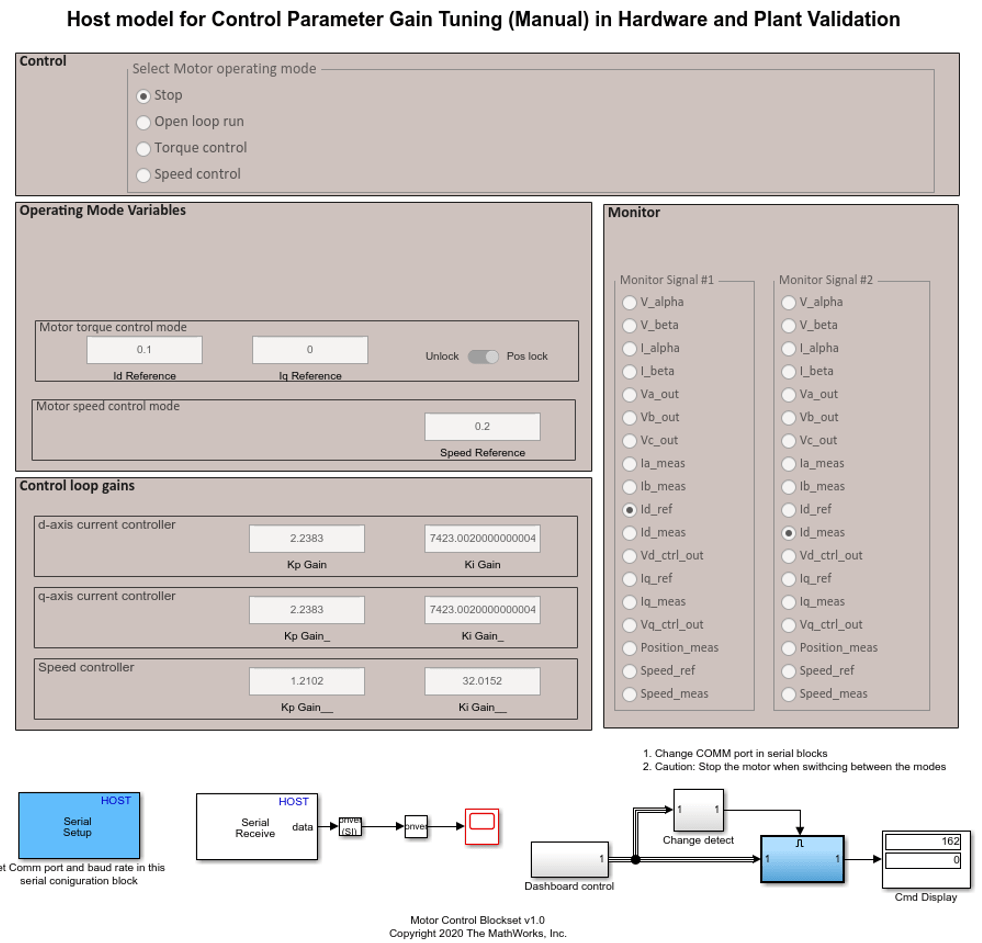
Используйте пример Tune Control Parameter Gains in Hardware и Validate Plant, чтобы измерить переходную характеристику токовых и скоростных контроллеров. Модель хоста в этом примере передает текущую ссылку на целевой компьютер и измеряет переходную характеристику токового контроллера.
Для проверки системы можно использовать любой пример регулировки скорости из Motor Control Blockset™.
Проверьте регулирование скорости путем сравнения переходной характеристики в симуляции и оборудовании значений теста.
Проверьте управление током по оси d путем электрической или механической блокировки ротора и сравнения шаговой характеристики в симуляции и результатов аппаратного тестирования.
Можно использовать другой метод для проверки текущего элемента управления d -ось. Запустите двигатель с постоянной скоростью и обеспечьте изменение шага в опорном d тока оси. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Установите опорный вход постоянной скорости. Ссылка Id команду из модели хоста. Сравните пошаговую характеристику тока оси d в симуляции и в аппаратных тестах.
Проверьте q тока оси путем механического соединения двигателя с внешним динамометром, вращающимся в регулировании скорости. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Сбросьте Id и Iq ссылку из вывода ПИ-контроллера скорости. Ссылка Id команду из модели хоста. Сравните пошаговую характеристику тока оси q в симуляции и в аппаратных тестах.
Предупреждение
При захвате шага в d тока оси всегда используйте положительный шаг. Отрицательные значения Id могут повредить постоянные магниты в PMSM.
Смотрите пример Настройка коэффициентов усиления параметров управления в оборудовании и валидация объекта, чтобы развернуть модель на оборудовании. Выполните оценку параметра двигателя, потому что точность в модели объекта управления важна, чтобы соответствовать результатам симуляции с аппаратными измерениями.
Перед сравнением характеристик контроллера в симуляции и в целевом компьютере крутящий момент нагрузки в симуляции объекта должен совпадать с нагрузкой на двигатель в физической системе. Выполните следующие шаги, чтобы вычислить крутящий момент нагрузки в физической системе и обновить вычисленный крутящий момент нагрузки в модели объекта управления.
Запустите модель хоста и соедините целевой компьютер через последовательную связь.
В рабочем режиме Выбрать двигатель выберите Speed control.
Двигатель вращается в регулировании скорости.
Выберите Id_meas в Monitor Signal #1 и Iq_meas в Monitor signal #2. Чтение Id_meas и Iq_meas значения из возможностей.
Преобразуйте ток в относительных единицах (PU) в Amperes путем умножения его на PU_System.I_base.
Вычислите крутящий момент нагрузки в Nm используя это уравнение:
где,
= Поток постоянных магнитов редактирования (pmsm.Flux_PM)
= Индуктивность при Генри (pmsm.Ld, pmsm. Lq)
= Ток, измеренный в амперах
Id_meas, измеренный ток I d (в PU), равен 0.
В mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) подсистема, обеспечивает вычисленное значение крутящего момента нагрузки как вход в LdTrq порт блока двигателя PMSM.
В симуляции предоставьте вход скорости и отметьте характеристику скорости. На целевом компьютере командуйте вход шага ссылки скорости и наблюдайте обратную связь скорости. Сравните получившиеся переходные характеристики в симуляции и в целевой компьютер, чтобы определить точность модели объекта управления.
Симулируйте модель mcb_pmsm_operating_mode_f28379d. Постройте график задающей скорости и измеренных сигналов скорости. По умолчанию этот пример предоставляет шаговый вход 0.2 на 0.5 в симуляционную модель.
Запустите модель хоста, чтобы связаться с целевым компьютером.
В рабочем режиме Select Motor смените режим с Stop на Speed control.
В модели хоста выберите Speed_ref в Monitor Signal#1 и Speed_meas в Monitor Signal#2.
Откройте возможности в модели хоста.
В интерфейсе модели хоста измените speed_ref от 0.2 на 0.5 и наблюдать изменение шага в возможности.
Сравните переходную характеристику аппаратных результатов с результатами симуляции.
Сравните переходную характеристику, полученную из симуляции, с измерениями, полученными от целевого компьютера. Результаты могут варьироваться в зависимости от допусков в модели объекта управления. Как правило, результаты симуляции близки к значениям, измеренным на целевом компьютере.
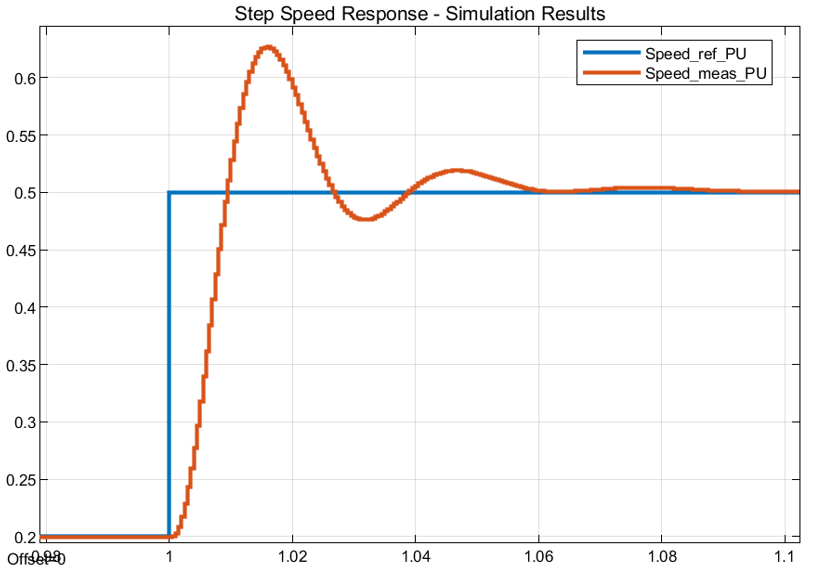
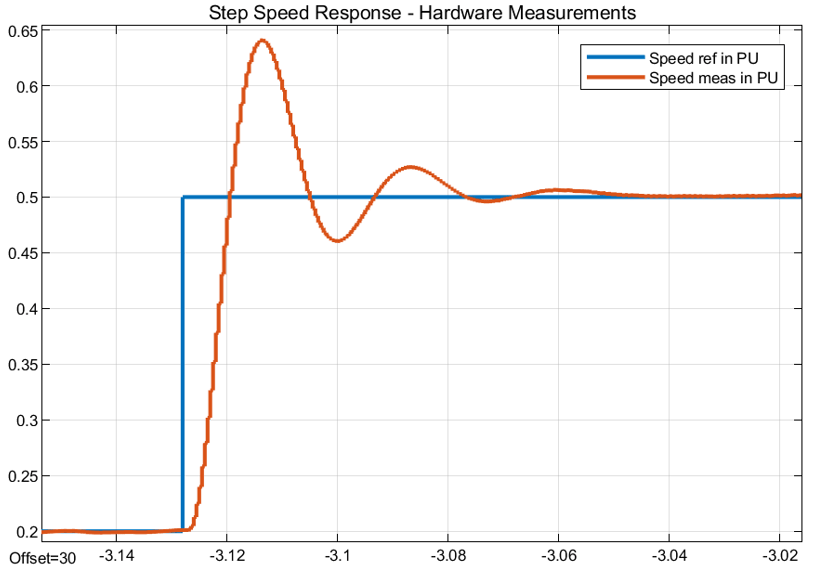
| Пиковое перерегулирование (%) | Пиковое время (мс) | Время нарастания (мс) | Время урегулирования (мс) | |
|---|---|---|---|---|
| Результаты симуляции | 20.13% | 16.023 | 5.561 | 61.027 |
| Аппаратные результаты | 22 % | 14.324 | 5.041 | 51.148 |
В симуляции предоставьте ссылку по шаговому току и отметьте текущую характеристику. Этот пример нуждается в некоторых изменениях, чтобы симулировать текущий вход эталонного шага. Смотрите эти шаги для изменений модели. Это относится только к симуляции. В целевом компьютере выполните команду current reference step input и наблюдайте текущую обратную связь. Сравните получившиеся переходные характеристики в симуляции и в целевой компьютер, чтобы определить точность модели объекта управления.
Для аппаратных измерений запустите модель хоста.
В рабочем режиме Select Motor смените режим с Stop на Torque control.
Выберите Id_ref в Monitor Signal#1 и Id_meas в Monitor Signal#2 в модели хоста.
Откройте возможности в модели хоста.
Изменение Id_ref от 0.02 на 0.22 и наблюдать изменение шага в возможности. Убедитесь, что двигатель не вращается. Область возможностей отображает переходную характеристику для Id_ref вход.
Для симуляции необходимо два изменения в модели симуляции. В mcb_pmsm_operating_mode_f28379d/TorqueControl/Control Modes/torque_control подсистема добавляет шаговый вход для токового контроллера d -оси. Выберите шаг входа 0.02 на 0.22 при 1 второе. Выберите выборку Time as -1. В блоке преобразования типа данных выберите выход тип данных следующим fixdt(1,32,17).
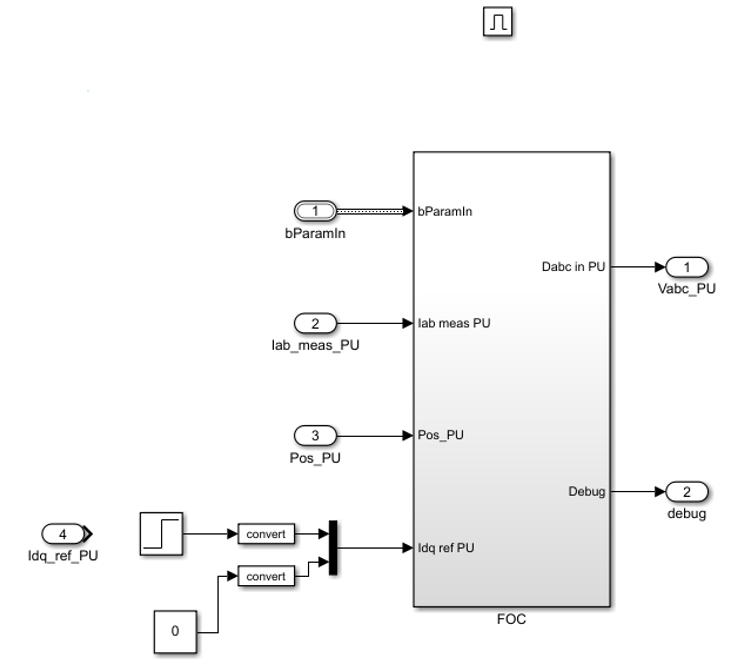
В блоке двигателя PMSM, доступном в mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) subsystem, смените конфигурацию механического входного строения на Speed и входную 0 к Spd входному порту.
Запустите симуляцию и измерьте Idref_PU и Idmeas_PU значения в Данные Моделирования Inspector.
Сравните переходную характеристику оборудования с результатами моделирования.
Сравните возможности изображение из симуляции с измерениями от целевого компьютера. Результаты могут варьироваться в зависимости от допусков в модели объекта управления. При точной модели объекта управления результаты симуляции ближе к измеренным результатам от целевого компьютера.
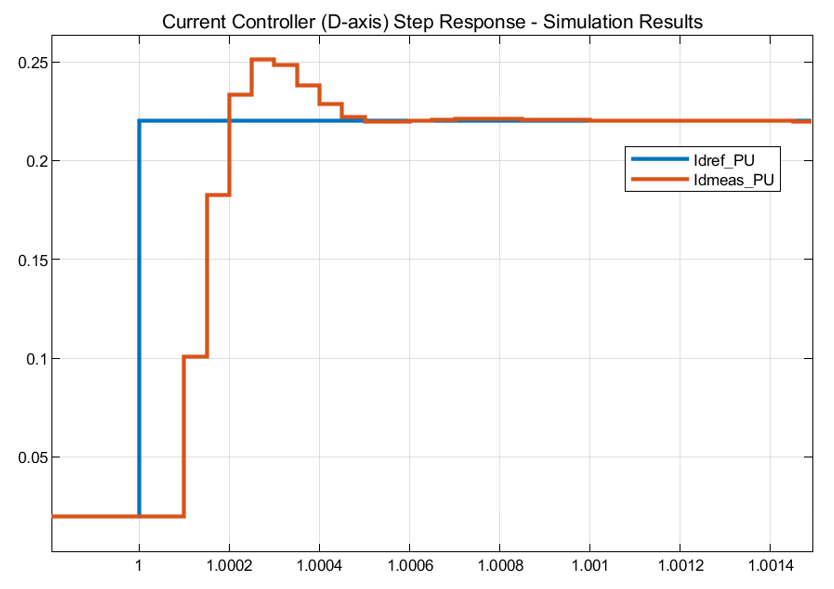
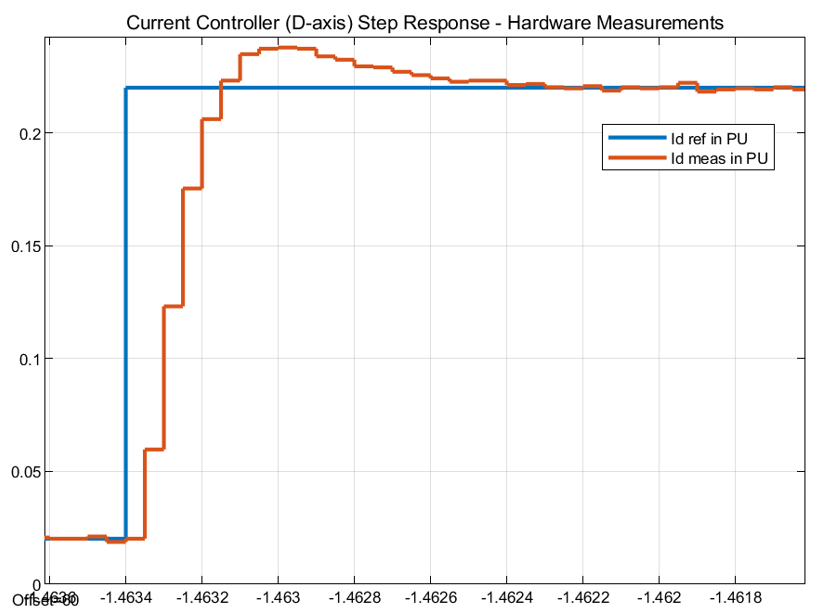
| Пиковое перерегулирование (%) | Пиковое время (мкс) | Время нарастания (мкс) | Время урегулирования (мкс) | |
|---|---|---|---|---|
| Результаты симуляции | 14 % | 300 | 150 | 500 |
| Аппаратные результаты | 8.18 % | 400 | 150 | 800 |
Точность модели объекта управления повышает точность симуляции и соответствует результатам тестирования оборудования.
Совет
Если результаты симуляции значительно отличаются от аппаратных измерений, проверьте задержку и масштабный коэффициент в модели объекта управления.
Примечание
Для токового контроллера q -оси выровняйте двигатель по оси d -и механически заблокируйте ротор. Следуйте этому для контроллера тока оси d для сравнительного анализа. Вы можете добиться внешней механической блокировки через механическую тормозную систему или путем связи с двигателем динамометра, работающим в регулировании скорости.
