Симулируйте помощь в поддержании маршрута с помощью адаптивного прогнозирующего контроллера модели
Модель прогнозирующего управления Toolbox/беспилотное вождение
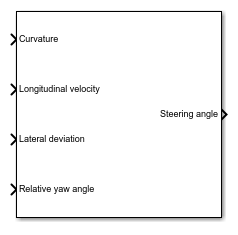
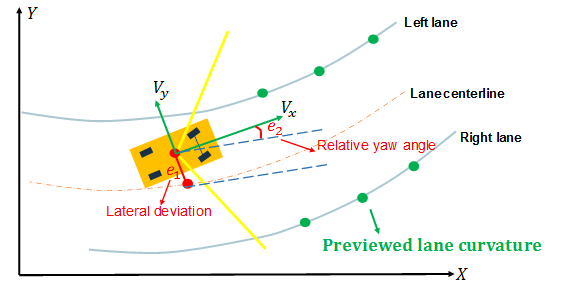
Блок Lane Keeping Assist System моделирует систему помощи при хранении маршрута (LKA), которая сохраняет автомобиль , оборудованный датчиком, перемещающийся по центру прямой или изогнутой дороги, путем регулировки угла поворота переднего руля. Контроллер уменьшает боковое отклонение и относительный угол рыскания автомобиля , оборудованного датчиком относительно осевой линии маршрута. Блок вычисляет оптимальные действия управления, удовлетворяя ограничениям угла поворота с помощью адаптивной модели прогнозирующего управления (MPC).
Чтобы настроить контроллер, например, использовать расширенные функции MPC или изменить начальные условия контроллера, нажмите Create LKA subsystem.
Curvature - Кривизна дорогиКривизна дороги, заданная как 1/ R, где R - радиус кривой в метрах.
Кривизна дороги:
Положительно, когда дорога изгибается к положительной оси Y глобальной системы координат.
Отрицательно, когда дорога изгибается к отрицательной оси Y глобальной системы координат.
Нуль для прямой дороги.
Контроллер моделирует кривизну дороги как измеренное нарушение порядка при предварительном просмотре. Кривизну можно задать как:
Скалярный сигнал - Задайте кривизну для текущего контрольного интервала. Контроллер использует это значение кривизны через горизонт предсказания.
Векторный сигнал с длиной меньше или равной Prediction Horizon - Задайте текущие и предсказанные значения кривизны на горизонте предсказания. Если длина вектора меньше, чем горизонт предсказания, то контроллер использует окончательное значение кривизны в векторе для оставшейся части горизонта предсказания.
Longitudinal velocity - Скорость Ego автомобиляАвтомобиль , оборудованный датчиком скорость в м/с.
Lateral deviation - Боковое отклонение ЭГОБоковое отклонение автомобиля , оборудованного датчиком в метрах от осевой линии маршрута.
Relative yaw angle - Угол от осевой линии маршрутаАвтомобиль , оборудованный датчиком угол продольной оси в радианах от осевой линии маршрута.
Minimum steering angle - Минимальный угол поворота руля спередиМинимальное ограничение угла рулевого управления спереди в радианах. Используйте этот входной порт, когда минимальный угол поворота руля изменяется во время исполнения.
Чтобы включить этот порт, выберите Use external source для параметра Minimum steering angle.
Maximum steering angle - Максимальный угол наклона рулевого управления спередиМаксимальное ограничение угла рулевого управления спереди в радианах. Используйте этот входной порт, когда максимальный угол поворота руля изменяется во время исполнения.
Чтобы включить этот порт, выберите Use external source для параметра Maximum steering angle.
Enable optimization - Сигнал разрешения оптимизации контроллераСигнал разрешения оптимизации контроллера. Когда этот сигнал:
Ненулевое, контроллер выполняет вычисление оптимизации и генерирует Steering angle сигнал управления.
Нуль, контроллер не выполняет вычисления оптимизации. В этом случае выходной сигнал Steering angle остается на значении, которое он имел, когда оптимизация была отключена. Контроллер продолжает обновлять оценки внутреннего состояния.
Чтобы включить этот порт, выберите параметр Use external signal to enable or disable optimization.
External control signal - Угол поворота, применяемый к эго-транспортному средствуФактический угол поворота в радианах, приложенных к автомобилю , оборудованному датчиком. Контроллер использует этот сигнал, чтобы оценить состояния модели автомобиль , оборудованный датчиком. Используйте этот вход порт, когда управляющий сигнал, приложенный к автомобилю , оборудованному датчиком, не совпадает с оптимальным управляющим сигналом, вычисленным прогнозирующим контроллером модели. Это несоответствие может произойти, когда, например:
Этот Lane Keeping Assist System не является активным контроллером. Поддержание точной оценки состояния, когда контроллер не активен, предотвращает выпуклости в управляющем сигнале, когда контроллер становится активным.
Привод рулевого управления отказывает и не выдает правильный сигнал управления автомобилю , оборудованному датчиком.
Чтобы включить этот порт, выберите параметр Use external control signal for bumpless transfer between PFC and other controllers.
Vehicle dynamics matrix A - Матрица состояний прогнозирующей модели автомобиль , оборудованный датчикомМатрица состояний прогнозирующей модели автомобиль , оборудованный датчиком. Количество строк в матрице состояний соответствует количеству состояний в прогнозирующей модели. Эта матрица должна быть квадратной.
Прогнозирующая модель автомобиль , оборудованный датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Vehicle dynamics matrix B - Матрица ввода в состояние прогнозирующей модели автомобиль , оборудованный датчикомМатрица ввода в состояние автомобиля , оборудованного датчиком прогнозирующей модели. Количество строк в этом сигнале должно совпадать с количеством строк в Vehicle dynamics matrix A.
Прогнозирующая модель автомобиль , оборудованный датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Vehicle dynamics matrix C - Матрица состояние-выход прогнозирующей модели автомобиль , оборудованный датчикомМатрица состояние-выход прогнозирующей модели автомобиль , оборудованный датчиком. Количество столбцов в этом сигнале должно совпадать с количеством строк в Vehicle dynamics matrix A.
Прогнозирующая модель автомобиль , оборудованный датчиком, заданная Vehicle dynamics matrix A, Vehicle dynamics matrix B и Vehicle dynamics matrix C, должна быть минимальной.
Чтобы включить этот порт, выберите параметр Use vehicle model.
Steering angle - Сигнал управления углом наклона переднего руляПередний сигнал управления углом поворота в радианах, генерируемых контроллером. Угол переднего рулевого управления является углом передних шин от продольной оси транспортного средства. Угол поворота положительный к положительной боковой оси автомобиль , оборудованный датчиком.
Use vehicle parameters - Определение модели эго-автомобиля с использованием свойств транспортного средстваon (по умолчанию) | offВыберите этот параметр, чтобы задать модель автомобиля , оборудованного датчиком, используемую контроллером MPC, путем определения свойств автомобиля , оборудованного датчиком. Модель автомобиля , оборудованного датчиком является линейной моделью от угла рулевого управления спереди до скорости угла поперечной скорости и рыскания. Для получения дополнительной информации см. Автомобиль , оборудованный датчиком Predictive Model.
Чтобы определить модель транспортного средства, задайте следующие параметры блоков:
Total mass
Yaw moment of inertia
Longitudinal distance from center of gravity to front tires
Longitudinal distance from center of gravity to rear tires
Cornering stiffness of front tires
Cornering stiffness of rear tires
Для получения дополнительной информации о модели автомобиля , оборудованного датчиком см. Автомобиль , оборудованный датчиком Прогнозирующей модели.
Выбор этого параметра очищает параметр Use vehicle model.
Параметры блоков:
ModelType |
| Тип: строка, вектор символов |
По умолчанию:
"Use vehicle parameters" |
Use vehicle model - Задайте модель ego vehicle с помощью матриц пространства состоянийoff (по умолчанию) | onВыберите этот параметр, чтобы задать матрицы пространства состояний модели автомобиля , оборудованного датчиком, используемой контроллером MPC. Эта модель является линейной моделью от угла рулевого управления спереди в радианах до поперечной скорости в метрах в секунду и скорости угла рыскания в радианах в секунду. Для получения дополнительной информации о модели автомобиля , оборудованного датчиком см. Автомобиль , оборудованный датчиком Прогнозирующей модели.
Чтобы задать начальную внутреннюю модель, задайте A, B и C матрицы пространства состояний. Внутренняя модель должна быть минимальной реализацией без прямого сквозного соединения, и размерности A, B и C должны быть последовательными.
Обычно автомобиль , оборудованный датчиком модель рулевого управления зависит от скорости, и, следовательно, она изменяется со временем. Чтобы обновить внутреннюю модель во время исполнения, используйте Vehicle dynamics A, Vehicle dynamics B и Vehicle dynamics C входные порты.
Выбор этого параметра очищает параметр Use vehicle parameters.
Параметры блоков:
ModelType |
| Тип: строка, вектор символов |
По умолчанию:
"Use vehicle parameters" |
Total mass - Масса Ego автомобиля1575 (по умолчанию) | положительная скалярная величинаАвтомобиль , оборудованный датчиком масса в кг.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
VehicleMass |
| Тип: строка, вектор символов |
По умолчанию:
"1575" |
Yaw moment of inertia - Момент инерции вокруг вертикальной оси эго-автомобиля2875 (по умолчанию) | положительная скалярная величинаМомент инерции вокруг вертикальной оси эго-автомобиля в Кг· м2.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
VehicleYawInertia |
| Тип: строка, вектор символов |
По умолчанию:
"2875" |
Longitudinal distance from center of gravity to front tires - Расстояние от центра масс эго-автомобиля до его передних шин1.2 (по умолчанию) | положительная скалярная величинаРасстояние от центра масс автомобиля , оборудованного датчиком до его передних шин в метрах, измеренное вдоль продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
LengthToFront |
| Тип: строка, вектор символов |
По умолчанию:
"1.2" |
Longitudinal distance from center of gravity to rear tires - Расстояние от центра масс эго-автомобиля до задних шин1.6 (по умолчанию) | положительная скалярная величинаРасстояние от центра масс автомобиля , оборудованного датчиком до задних шин в метрах, измеренное вдоль продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
LengthToRear |
| Тип: строка, вектор символов |
По умолчанию:
"1.6" |
Cornering stiffness of front tires - Жесткость передней шины19000 (по умолчанию) | положительная скалярная величинаЖесткость передней шины в N/рад, определяемая как отношение между боковой силой на передних шинах и углом шин к продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
FrontTireStiffness |
| Тип: строка, вектор символов |
По умолчанию:
"19000" |
Cornering stiffness of rear tires - Жесткость задней шины33000 (по умолчанию) | положительная скалярная величинаЖесткость задней шины в N/рад, определяемая как отношение между боковой силой на задних шинах и углом шин к продольной оси транспортного средства.
Чтобы включить этот параметр, выберите параметр Use vehicle parameters.
Параметры блоков:
RearTireStiffness |
| Тип: строка, вектор символов |
По умолчанию:
"33000" |
A - Матрица начальных состояний прогнозирующей модели автомобиль , оборудованный датчикомМатрица начального состояния прогнозирующей модели автомобиль , оборудованный датчиком. Количество строк в матрице состояний соответствует количеству состояний в прогнозирующей модели. Эта матрица должна быть квадратной.
Начальный автомобиль , оборудованный датчиком прогнозирующая модель, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиль , оборудованный датчиком изменяется со временем. Чтобы обновить матрицу состояний во время исполнения, используйте Vehicle dynamics A входной порт.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixA |
| Тип: строка, вектор символов |
По умолчанию:
"[-4.4021 ,-12.4603;1.3913,-5.1868]" |
B - Исходная матрица «вход-состояние» прогнозирующей модели автомобиль , оборудованный датчикомИсходная матрица ввода в состояние автомобиля , оборудованного датчиком прогнозирующей модели. Количество строк в этом параметре должно совпадать с количеством строк в A.
Начальный автомобиль , оборудованный датчиком прогнозирующая модель, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиль , оборудованный датчиком изменяется со временем. Чтобы обновить матрицу ввода в состояние во время исполнения, используйте Vehicle dynamics B входной порт.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixB |
| Тип: строка, вектор символов |
По умолчанию:
"[24.1270;15.8609]" |
C - Исходная матрица состояния на выходе прогнозирующей модели автомобиль , оборудованный датчикомИсходная матрица состояние-выход прогнозирующей модели автомобиль , оборудованный датчиком. Количество столбцов в этом параметре должно совпадать с количеством строк в A.
Начальный автомобиль , оборудованный датчиком прогнозирующая модель, заданная A, B и C, должна быть минимальной.
Как правило, модель автомобиль , оборудованный датчиком изменяется со временем. Чтобы обновить матрицу состояния до выхода во время исполнения, используйте Vehicle dynamics C входной порт.
Чтобы включить этот параметр, выберите параметр Use vehicle model.
Параметры блоков:
EgoModelMatrixC |
| Тип: строка, вектор символов |
По умолчанию:
"[1,0;0,1]" |
Initial longitudinal velocity - Начальная скорость ego vehicle15 (по умолчанию) | положительная скалярная величинаНачальная скорость модели автомобиль , оборудованный датчиком, когда помощь в поддержании маршрута включена в м/с. Эта скорость может отличаться от фактического автомобиля , оборудованного датчиком начальной скорости.
Примечание
Очень маленькая начальная скорость, например eps, может привести к неминимальной реализации для модели объекта контроллера, вызывая ошибку. Чтобы предотвратить эту ошибку, установите начальную скорость на большее значение, например 1e-3.
Параметры блоков:
InitialLongVel |
| Тип: строка, вектор символов |
По умолчанию:
"15" |
Transport lag between model inputs and outputs - Общая задержка транспортировки в модели автомобиль , оборудованный датчиком0 (по умолчанию) | неотрицательной скаляромОбщая задержка транспортировки, τ, в модели автомобиль , оборудованный датчиком в секундах. Эта задержка включает в себя привод, датчик и лаги связи. Для каждого входно-выходного канала задержка переноса аппроксимируется:
Параметры блоков:
TransportLag |
| Тип: строка, вектор символов |
По умолчанию:
"0" |
Minimum steering angle - Минимальный угол поворота руля спереди-0.26 (по умолчанию) | скаляром между -pi/2 и pi/2Минимальное ограничение угла рулевого управления спереди в радианах.
Если минимальный угол поворота изменяется с течением времени, добавьте Minimum steering angle входной порт к блоку, выбрав Use external source.
Этот параметр должен быть меньше, чем параметр Maximum steering angle.
Параметры блоков:
MinSteering |
| Тип: строка, вектор символов |
По умолчанию:
"-0.26" |
Maximum steering angle - Максимальный угол наклона рулевого управления спереди0.26 (по умолчанию) | скаляром между -pi/2 и pi/2Максимальное ограничение угла рулевого управления спереди в радианах.
Если максимальный угол поворота изменяется с течением времени, добавьте Maximum steering angle входной порт к блоку, выбрав Use external source.
Этот параметр должен быть больше, чем параметр Minimum steering angle.
Параметры блоков:
MaxSteering |
| Тип: строка, вектор символов |
По умолчанию:
"0.26" |
Sample time - шаг расчета контроллера0.1 (по умолчанию) | положительная скалярная величинаШаг расчета контроллера в секундах.
Параметры блоков:
Ts |
| Тип: строка, вектор символов |
По умолчанию:
"0.1" |
Prediction horizon - Горизонт предсказания контроллера10 (по умолчанию) | положительное целое числоШаги горизонта предсказания контроллера. Время предсказания контроллера является продуктом шага расчета и горизонта предсказания.
Параметры блоков:
PredictionHorizon |
| Тип: строка, вектор символов |
По умолчанию:
"30" |
Controller behavior - эффективность контроллера с обратной связью0.5 (по умолчанию) | скаляром между 0 и 1Контроллер с обратной связью эффективности. Значение по умолчанию значения параметров обеспечивает сбалансированное проектирование контроллера. Определение:
Меньшее значение создает более устойчивый контроллер с более плавными действиями управления.
Большее значение создает более агрессивный контроллер с более быстрым временем отклика.
Когда вы изменяете этот параметр, изменение применяется к контроллеру немедленно.
Параметры блоков:
ControllerBehavior |
| Тип: строка, вектор символов |
По умолчанию:
"0.5" |
Use suboptimal solution - Применить неоптимальное решение после заданного количества итерацийoff (по умолчанию) | onСконфигурируйте контроллер, чтобы применить неоптимальное решение после заданного максимального количества итераций, что гарантирует наихудшее время выполнения для вашего контроллера.
Для получения дополнительной информации см. Suboptimal QP Solution.
После выбора этого параметра задайте параметр Maximum iteration number.
Параметры блоков:
suboptimal |
| Тип: строка, вектор символов |
По умолчанию:
"off" |
Maximum iteration number - Максимальные итерации оптимизации10 (по умолчанию) | положительное целое числоМаксимальное количество итераций оптимизации контроллера.
Чтобы включить этот параметр, выберите параметр Use suboptimal solution.
Параметры блоков:
maxiter |
| Тип: строка, вектор символов |
По умолчанию:
"10" |
Use external signal to enable or disable optimization - Добавить порт для оптимизацииoff (по умолчанию) | onЧтобы добавить Enable optimization входной порт к блоку, выберите этот параметр.
Параметры блоков:
optmode |
| Тип: строка, вектор символов |
По умолчанию:
"off" |
Use external signal for bumpless transfer between LKA and other controllers - Добавьте входной порт внешнего сигнала управленияoff (по умолчанию) | onЧтобы добавить External control signal входной порт к блоку, выберите этот параметр.
Параметры блоков:
trackmode |
| Тип: строка, вектор символов |
По умолчанию:
"off" |
Create LKA subsystem - Создайте пользовательский контроллерСгенерируйте пользовательскую подсистему LKA, которую можно изменить для своего приложения. Данные строения контроллера для пользовательского контроллера экспортируются в MATLAB® рабочая область как структура.
Можно изменить пользовательскую подсистему контроллера следующим образом:
Измените настройки MPC по умолчанию или используйте расширенные функции MPC.
Измените начальные условия контроллера по умолчанию.
Прогнозирующей моделью автомобиль , оборудованный датчиком по умолчанию является следующая модель пространства состояний:
Здесь:
VX - продольная скорость автомобиля. В начале симуляции эта скорость равна параметру Initial condition for longitudinal velocity. Во время исполнения эта скорость равна Longitudinal velocity входному сигналу.
m является параметром Total mass.
IZ является параметром Yaw moment of inertia.
LF является параметром Longitudinal distance from center of gravity to front tires.
LR является параметром Longitudinal distance from center of gravity to rear tires.
CF является параметром Cornering stiffness of front tires.
CR является параметром Cornering stiffness of rear tires.
Входом для этой модели является угол рулевого управления в радианах, и выходами являются поперечная скорость в метрах в секунду и скорость угла рыскания в радианах в секунду.
Чтобы задать другую прогнозирующую модель автомобиль , оборудованный датчиком, выберите параметр Use vehicle model и задайте начальную модель пространства состояний. Затем задайте значения во время выполнения матриц пространства состояний, используя Vehicle dynamics A, Vehicle dynamics B и Vehicle dynamics C входные сигналы.
Контроллер создает свою внутреннюю прогнозирующую модель, увеличивая автомобиль , оборудованный датчиком динамическую модель. Дополненная модель включает кривизну дороги в качестве измеренного входного сигнала нарушения порядка.
По умолчанию прогнозирующий контроллер модели принимает следующие начальные условия для автомобиля , оборудованного датчиком:
Продольная скорость равна параметру Initial longitudinal velocity.
Поперечная скорость равна нулю.
Угол поворота равен нулю.
Скорость угла рыскания равна нулю.
Если начальные условия в модели не соответствуют этим условиям, выход Steering angle может показать начальный отбойник в начале симуляции.
Чтобы изменить начальные условия контроллера, соответствующие вашей симуляции, создайте пользовательскую систему управления поддержанием маршрута путем, на вкладке Block, нажав Create LKA subsystem.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.


