В этом разделе показано, как сгенерировать Simulink® модель, которая использует текущий прогнозирующий контроллер модели для управления ее внутренней моделью объекта управления.
Чтобы создать модель Simulink:
В приложении MPC Designer в интерактивном режиме проектируйте и настраивайте прогнозирующий контроллер модели.
На вкладке Tuning, в разделе Analysis, щелкните стрелу Export Controller.![]()
Кроме того, на вкладке MPC Designer, в разделе Result, нажмите Export Controller.
В разделе Export Controller нажмите Generate Simulink Model
![]() .
.
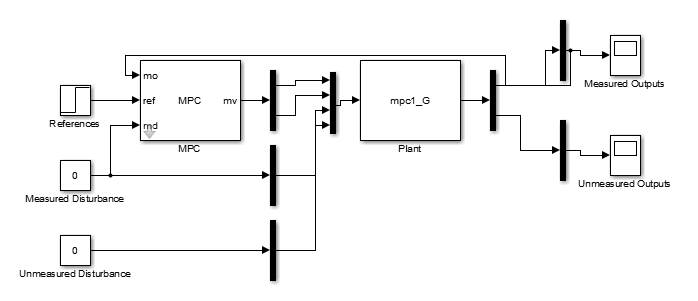
Приложение экспортирует текущий контроллер MPC и его внутреннюю модель объекта управления в MATLAB® рабочая область и создает модель Simulink, которая содержит блок MPC Controller и блок Plant
Кроме того, изменения по умолчанию в уставках выхода добавляются к блоку References.
Используйте сгенерированную модель, чтобы подтвердить проектирование контроллера. Сгенерированная модель служит шаблоном для простого перехода от окружения проекта MATLAB к окружению Simulink.
Можно также использовать модель Simulink, чтобы сгенерировать код и развернуть его для приложений управления в реальном времени. Для получения дополнительной информации см. «Генерация кода» и «Развертывание контроллера на целевых устройствах в реальном времени».
