Вычислите направленность массива
D = directivity(array,FREQ,ANGLE)array, на частотах, заданных FREQ и в углах направления, заданных ANGLE.
Интегрирование, используемое при вычислении направленности массива, имеет минимальную сетку дискретизации 0,1 степеней. Если шаблон имеет ширину луча, меньшую этой, значение направленности будет неточным.
directivity(___, строит графики шаблона массива с дополнительными опциями, заданными одним или несколькими Name,Value)Name,Value аргументы в виде пар.
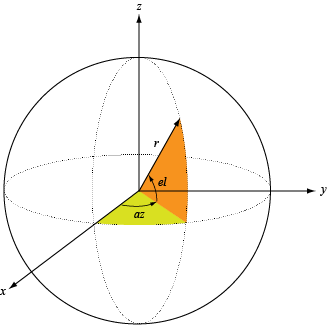
Задайте значения азимута и повышения, используемые в тулбоксе.
azimuth angle вектора является угол между осью x и ее ортогональной проекцией на xy-плоскость. Угол положителен при движении от оси x к оси y. Азимутальные углы лежат между -180 ° и 180 ° степеней включительно. elevation angle является углом между вектором и его ортогональной проекцией на xy -плоск. Угол положителен при движении к положительной оси z от xy плоскости. Углы возвышения лежат между -90 ° и 90 ° степеней.