Линейный привод с силовыми характеристиками биологической мышцы
Simscape/Жидкости/Газ/Приводы
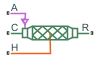
Блок Air Muscle привода (G) моделирует популярный в робототехнике линейный привод за его характеристики, напоминающие биологическую мышцу. Привод содержит расширяемую перегородку в оплетённом интерпретаторе. Когда баллон герметизируется, пара расширяется и одновременно сокращается, создавая на их концевых прописных буквах сжимающую силу. Гидроемкость герметизируется в газовом порту A; сила прикладывается к портам R и C Mechanical Translational.
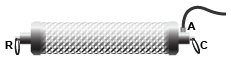
Воздушная мышца в расслабленном состоянии
Воздушные мышцы часто устанавливаются парами - одна мышца служит агонистом, другая - антагонистом. Пары такого рода распространены в организме человека, где бицепсы (в руке) сопровождают трицепсы, а квадрицепсы (в ноге) сопровождают подколенные сухожилия. Мышцы прикрепляются на одном конце к шарниру, но со смещением так, чтобы создать крутящий момент. Когда крутящий крутящий момент привода отличается от нуля, и если позволяют условия нагрузки, соединение вращается.
Масса и энергетический баланс привода являются такими, как описано для блока Translational Mechanical Converter (G). Сила привода, однако, основана на стандартном уравнении Чоу-Ханнафорда (с двумя коррекциями, сделанными для упрощающих допущений исходной модели). В своей первоначальной форме уравнение Чоу-Ханнафорда даёт:
где:
F - сжимающая сила, приложенная приводом к его концам. Нижний индекс C-H обозначает теоретическое значение исходной модели Чоу-Ханнафорда.
D - диаметр блока перегородки и интерпретатора. Нижний индекс M обозначает его максимальное теоретическое значение - то, в котором косы интерпретатора находятся под прямым углом к ее продольной оси.
P - абсолютное давление в перегородке (измеряется по отношению к окружению, внешней по отношению к приводу).
L - длина привода (расстояние между механическими портами R и C.
l - естественная длина оплетки (прежде чем она растянется в герметичном баллоне). Косы, так как они намотаны вокруг продольной оси привода, всегда длиннее, чем сам привод).
Максимальный теоретический диаметр привода определяется как:
где n - количество поворотов, которые оплетка делает вокруг продольной оси привода.
Неявными в уравнении Чоу-Ханнафорда являются предположения о бесконечно тонких мочевом пузыре и интерпретаторе и о неупругих косах, неспособных растягиваться. Оба предположения могут снизить точность модели и исправлены в этом блоке. Коррекция на растяжение в оплетке заменяет l постоянной длины на длину переменной l*:
где l - естественная длина косы, используемой в исходном уравнении Чоу-Ханнафорда и:
C - коррекция термин для растяжения оплетки.
E - модуль упругости Юнга для материала косы.
d - диаметр пряди в оплетке (каждая оплетка является пучком плотно переплетенных прядей).
Термин коррекции растяжения оплетки определяется как:
где N - общее количество прядей в плетеном интерпретаторе. Коррекция на толщину перегородки и интерпретатора добавляет к общей силе привода коэффициент:
где t - совокупная толщина перегородкиинтерпретатора и индекса T обозначает коррекцию для толщины. Общая сила привода составляет:
где длина цепи, используемая в вычислении термина Чоу-Ханнафорда, является переменной l*. Эта сила противодействует в пределы расширения и сужения поступательными жёсткими упорами. Они моделируются как описано для блока Translational Hard Stop.
Сопротивление потоку между входным отверстием газа (порт A) и внутренней частью привода отсутствует.
Отсутствует тепловое сопротивление между стенкой привода (порт H) и газом, который она окружает.
Привод герметичен и не течет.
Эффекты трения и инерции игнорируются.
Мочевой пузырь и интерпретатор идеально цилиндрические независимо от уровня инфляции.
Продольная упругость мочевого пузыря игнорируется.

