Привод одностороннего или двойного действия, управляемый давлением управления в изотермической гидравлической сети
Simscape/Жидкости/Приводы Клапана и Силы

Блок привода клапана управления (IL) моделирует привод одностороннего или двойного действия, управляемый давлением управления для управления соединенным клапаном или отверстием в изотермической гидравлической сети.
Для привода одностороннего действия, когда давление управления, P X - P атм, превышает Spring preload force at port X, поршень начинает вращаться в направлении, заданном параметром Mechanical orientation.
Для привода двойного действия управление давлением P управлением является различием между P X - P атм и P Y - P атм. Поршень действует в направлении большего приложенного перепада давления, противоположно упругой силе у противоположного порта. Когда перемещение поршня меняется назад, эта пружина не простирается и не прикладывает противовесного усилия к положению поршня.
Поршни порта X и порта Y прикреплены к одному золотнику. Обе пружины восстанавливают золотник в нейтральное положение F когда золотник падает ниже противолежащего предварительного поджатия пружины. Для приводов одностороннего действия нейтральное положение находится в порту X. Для приводов двойного действия нейтральное положение находится в центре привода.
Сила на поршне создается перепадом давления между портом X и атмосферным давлением:
где A X является Piston area at port X. Когда F золотник больше Spring preload force at port X, поршень начинает двигаться.
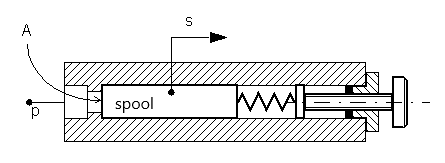
Схема гидропривода одностороннего действия
Текущее перемещение поршня определяется как:
где установившееся положение поршня, x установившееся, является положением поршня при текущем перепаде давления, пропорциональном упругой силе при максимальном штрихе поршня :
где:
F pre является Spring preload force at port X.
F max - это максимальная упругая сила, действующая на перемещение поршня , и где K Spring stiffness at port X.
x штриха является Piston stroke from port X.
ε - Mechanical orientation, который указывает движение поршня в положительном направлении (удлинение) или отрицательном направлении (уборка).
Если сила на поршне меньше Spring preload force at X, поршень остается в нейтральном положении или переходит в нейтральное положение. Если сила на поршне соответствует или превышает максимальную упругую силу, поршень остается на штрих до тех пор, пока приложенные скачки давления.
Различие между силами в портах X и Y диктует перемещение поршня:
Давление, приложенное к порту X, смещает золотник от ёмкости на X и противостоит пружине у порта Y. Точно так же давление, приложенное к порту Y, смещает золотник от ёмкости в Y и противостоит пружине в порту X. Когда золотник изменяет направление назад, ранее удлиненная пружина сжимается, прикладывая силу к золотнику. Ранее сжатая пружина, пружина у порта в направлении движения, не простирается и не влияет на положение золотника.
Схема привода двойного действия
Перемещение поршня вычисляется как:
где установившееся положение поршня, x установившееся, является положением поршня при текущем перепаде давления, пропорциональном упругой силе при максимальном штрихе поршня :
где:
F pre, X и F pre, Y являются Spring preload force at port X и Spring preload force at port Y, соответственно.
F max, X и F max, Y являются максимальными упругими силами, действующими на перемещение поршня в портах X и Y, соответственно, где:
K - жесткость пружины на порт.
x штрих - это штрих поршня на порт.
ε - Mechanical orientation, который присваивает сигнал движения поршня положительный (удлинение) или отрицательный (уборка).
Если сила на поршне меньше, чем соответствующее предварительное поджатие пружины порта, поршень остается или возвращается в нейтральное положение. Если сила на поршне соответствует или превышает максимальную упругую силу для соответствующего порта, поршень остается на ходу поршня до тех пор, пока приложенное давление не изменится.
Когда привод близок к полному удлинению или полному уборке, можно сохранить числовую робастность в симуляции, регулируя Smoothing factor блока. При ненулевом коэффициенте сглаживания функция сглаживания применяется ко всем вычисленным силам, но в основном влияет на симуляцию в крайних точках перемещения поршня.
Когда Actuator configuration установлено на Single-actingнормированное усилие на поршне вычисляется как:
Когда Actuator configuration установлено на Double-actingнормированное усилие на поршень при X вычисляется как:
и нормированная сила в Y вычисляется как:
Когда Smoothing factor, s, ненулевая, каждая нормированная сила включает сглаживание:
Распределитель (IL) | Привод двойного действия (IL) | Запорный клапан с управлением управления (IL) | Гидропривод одностороннего действия (IL)

