Степень систему трансмиссии с цепью и двумя звездочками
Simscape/Driveline/Муфты и приводы

Блок Chain Drive представляет систему степени передачи с цепью и двумя звездочками. Цепь зацепляется со звездочками, передавая вращательное движение между ними. Передача степени может происходить задним числом, то есть от ведомой до ведущей звездочки, из-за внешних нагрузок. Это условие известно как обратное вождение.
Цепь привода соответствует требованиям. Он может растягиваться под напряжением или ослабевать, если свободен. Модель податливости состоит из линейной пружины-демпфера, расположенной параллельно. Пружина сопротивляется растягиванию цепи. Демпфер сопротивляется движению растяжения между элементами цепи.
Силы пружины и демпфера действуют непосредственно на звездочки, которые соединяет цепь. Упругая сила присутствует, когда одна цепная ветвь прижата. Сила демпфера присутствует постоянно. Чтобы представлять и сообщать о условии отказа, симуляция останавливается и генерирует ошибку, если чистое растягивающее усилие в цепи превышает заданное максимальное значение натяжения.
Блок учитывает вязкое трение на подшипниках шарниров звездочки. Во время движения вязкое трение вызывает потери степени, снижая эффективность цепного привода. Эти потери составляют соединение из-за демпфирования цепи. Чтобы исключить потери степени в цепном приводе, в настройках Dynamic установите параметры вязкого трения и демпфирования цепи в нуль.
Скорость растяжения в цепи является различием между тангенциальными скоростями звездочки, которые являются продукта скорости вращения и радиусов тангажа. Математически,
где:
x - растяжение.
ωA ωB являются скорости вращения звездочки.
RA RB являются радиусами тангажа звездочки.
Рисунок показывает соответствующие переменные.
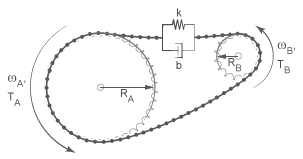
Сила растяжения цепи является чистой суммой сил пружины и демпфера. Упругая сила является продуктом растягивающего напряжения и постоянной жесткости пружины. Эта сила равна нулю, когда деформация растяжения меньше, чем ослабление цепи. Сила демпфера является продуктом скорости растяжения и коэффициента демпфирования. Математически,
где:
S - ослабление цепи.
k - постоянная жесткость пружины.
b - коэффициент демпфера.
Цепь выполняет крутящий момент на каждой звездочке, равный продукт растягивающей силы и радиуса тангажа звездочки. Два крутящих момента действуют в противоположных направлениях согласно этим уравнениям:
Где:
τA - крутящий момент, который цепь применяет к A звездочки.
τB - крутящий момент, который цепь применяет к B звездочки.
С точки зрения скорости и фактора трения эти уравнения применяются:
Где:
ωA - скорость вращения для A звездочки.
ωB - скорость вращения для B звездочки.
μA - коэффициент вязкого трения для A звездочки.
μB - коэффициент вязкого трения для B звездочки.
Используйте вкладку Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
В отличие от параметров блоков, переменные не имеют условной видимости. На вкладке Variables перечислены все существующие основные переменные. Если переменная не используется в наборе уравнений, соответствующих выбранному строению блока, значения, заданные для этой переменной, игнорируются.
Отношение зубьев звездочек равняется отношению радиуса тангажа звездочки.
Инерция цепи незначительна.

