Фрикционный тормоз с двумя поворотными башмаками, диаметрально расположенными вокруг вращающегося барабана с срабатыванием
Simscape/Приводная линия/Тормоза и тормоза/Вращательный

Блок Double-Shoe Brake представляет собой фрикционный тормоз с двумя поворотными жесткими башмаками, которые прижимаются к вращающемуся барабану для создания тормозного действия. Жесткие башмаки находятся внутри или снаружи вращающегося барабана в диаметрально противоположном строении. Положительное приводное усилие заставляет жесткие башмаки прижиматься к вращающемуся барабану. Вязкое и контактное трение между барабаном и твердыми поверхностями башмака заставляет вращающийся барабан замедляться.
Двухколодочные тормоза обеспечивают высокий тормозной крутящий момент с небольшими отклонениями привода в приложениях, которые включают транспортные средства мотора и некоторое тяжелое машинное оборудование. Модель использует простую параметризацию с легкодоступной геометрией тормоза и параметрами трения.
Можно также включить отказ. Когда происходит отказ, ремень прикладывает определенную пользователем силу. Отказы могут возникнуть в указанное время или из-за внешнего триггера на порте T.
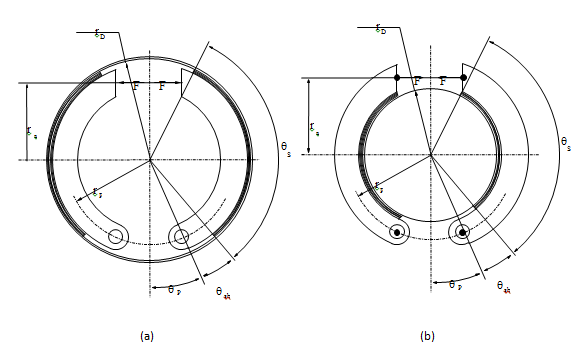
В схеме a) представляет собой внутренний двухколодочный тормоз, а b) представляет собой внешний двухколодочный тормоз. В обоих строений положительная сила приводов F вводит поверхности трения башмака и барабана в контакт. Результатом является крутящий момент трения, который вызывает замедление вращающегося барабана. Нулевые и отрицательные силы не приводят поверхности трения башмака и барабана в контакт и создают нулевой крутящий момент торможения.
Модель использует приближение длинной обуви. Уравнения для крутящего момента трения, который развивают ведущая и конечная башмаки:
где ,
и для ,
Где:
TLS - это момент привода, которую развивает ведущая обувь.
TTS является моментом привода развития конечной обуви.
μ - эффективный коэффициент трения контакта.
pa - максимальное линейное давление в переднем контакте башмака-барабан.
pb - максимальное линейное давление в заднем контакте башмака-барабана.
rD - радиус барабана.
θsb - угол начала обуви.
θs - угол пролета башмака.
θa - угол от шарнира до точки максимального давления.
c - длина рычага силы цилиндра относительно шарнира контакта.
rp - радиус положения контакта.
θp - угол положения шарнирного контакта.
ra - радиус положения привода.
Модель принимает, что только трение Кулона действует на контакт обуви с поверхностью барабана. Нулевая относительная скорость между барабаном и башмаком создает нулевое трение Кулона. Чтобы избежать разрыва при нулевой относительной скорости, в формуле коэффициента трения используется гиперболическая функция
где:
μ - эффективный коэффициент трения контакта.
μCoulomb - коэффициент трения контакта.
ωshaft - скорость вала.
ωthreshold - скорость вращения.
Балансировка моментов, которые действуют на каждый башмак относительно штифта, приводит к давлению, действующему на поверхностный контакт башмака-барабана. Уравнения для определения баланса моментов для переднего башмака
и
где:
F является силой приводов.
MN - это момент, действующий на передний башмак от нормальной силы.
MF - момент, действующий на передний башмак от силы трения.
c - длина рычага силы цилиндра относительно шарнира контакта.
pa - максимальное линейное давление на контактной поверхности башмака-барабана.
rp - радиус положения контакта.
θp - угол положения шарнирного контакта.
ra - радиус положения привода.
Модель не моделирует автоблокировку тормозов. Если геометрия тормоза и параметры трения вызывают условие автоблокировки, модель производит ошибку симуляции. Тормоз автоблокируется, если момент трения превышает момент от нормальных сил, то есть когда MF > MN.
Баланс моментов для конечной обуви
Крутящий момент сетевого торможения
где μvisc - коэффициент вязкого трения.
Когда отказы включены, усилие ремня прикладывается в ответ на один или оба из этих триггеров:
Время симуляции - Нарушение происходит в указанное время.
Симуляция поведения - Нарушение происходит в ответ на внешний триггер. Это открывает T порта.
Если возникает триггер отказа, входная сила заменяется Belt force when faulted значением для оставшейся части симуляции. Значение 0 подразумевает, что торможение не произойдет. Относительно большое значение подразумевает, что тормоз застревает.
Можно задать блок, чтобы выдать отчет о неисправности как предупреждение или сообщение об ошибке в Simulink Diagnostic Viewer с параметром Reporting when fault occurs.
Можно смоделировать эффекты теплового потока и изменения температуры, выставив дополнительный тепловой порт. Чтобы выставить порт, в настройках Friction установите параметр Thermal Port равным Model. Экспозиция порта также открывает или изменяет значение по умолчанию для этих связанных настроек, параметров и переменных:
Friction> Temperature
Friction> Static friction coefficient vector
Friction> Coulomb friction coefficient vector
Friction> Contact friction coefficient vector
Thermal Port> Thermal mass
Variables> Temperature
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Настройки переменной видны только тогда, когда в настройках Friction параметр Thermal port установлен на Model.
Контактные углы меньше 45 ° дают менее точные результаты.
Тормоз использует длинноколодочное приближение.
Геометрия тормоза не автоблокируется.
Модель не учитывает расход потока привода.
