The sdl_vehicle_dual_clutch пример модели иллюстрирует важные точки о моделировании как физического, так и системы управления с использованием окружения Simscape™ и Simscape Driveline™ и библиотек.
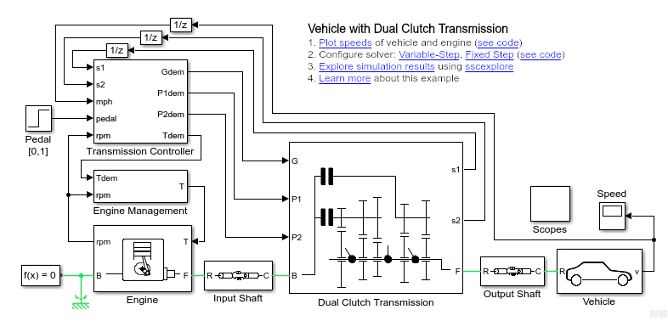
Модель представляет автоматическую коробку передач с двумя сцеплениями. В автоматической коробке передач подсистема управления двигателем решает, когда менять передаточное отношение и каково следующее передаточное отношение. Отклонение педали, накладываемое драйвером транспортного средства, преобразуется в требуемый крутящий момент двигателя. Требуемый крутящий момент и текущая скорость переднего транспортного средства вместе определяют, на какое передаточное отношение переключается трансмиссия, прежде чем она фактически переключается (предварительный выбор передачи). Путем постепенного снижения давления сцепления система управления трансмиссией плавно разблокирует и отключает строение сцепления с учетом передаточного числа тока. В то же время система управления постепенно повышает давления в муфте для достижения нового передаточного числа путем зацепления и блокировки нового строения муфты.
Физические компоненты трансмиссии, от двигателя, передач и сцеплений, до транспортного средства корпуса и шины, моделируются с помощью блоков Simscape Driveline, с физическими портами и соединениями.
Алгоритмическое управление коробкой передач, включая переключение передач и управление коробкой передач, моделируется с помощью нормального Simulink® блоки с портами сигналов, сигнальными линиями и включенными подсистемами.
Транспортное средство с моделью двойного сцепления
Модель также настроена, чтобы позволить вам переключаться между двумя общими строениями симуляции. Чтобы сконфигурировать модель для симуляции с помощью глобального решателя с переменным шагом или локального решателя с фиксированным шагом, щелкните ссылки в описании.
Можно непосредственно настроить все опции решателя, открывая диалоговые окна Параметров конфигурации модели и Solver Configuration сети.
