Этот пример показов, как обнаружить и ответить на отказ в ходовую часть с помощью блока Rotational Damper. Блок Rotational Damper позволяет вам задать коэффициент демпфирования как функцию от временных или поведенческих триггеров. Можно запрограммировать коэффициент демпфирования на изменение в конкретный момент времени в симуляции или когда количество ударов для заданного ускорения превышает предел для моделирования поведения при отказе. Моделирование отказа позволяет вам предсказать, как ваша фактическая физическая система реагирует, когда она испытывает реальные отказы. Это также позволяет вам проверить робастность и отзывчивость своей системы управления.
В этом примере отказ обнаруживается демпфером, который присоединен к гибкому валу. Хотя большинство шагов в этом примере можно выполнить с помощью инструментов, которые Simulink® и Simscape™ Driveline™ обеспечивают пользовательские интерфейсы, поставляются скрипты. Можно объединить скрипты в больший скрипт для сдвигов параметров.
Откройте модель. В MATLAB® в командной строке введите:
model = 'sdl_flexible_shaft';
open_system(model)
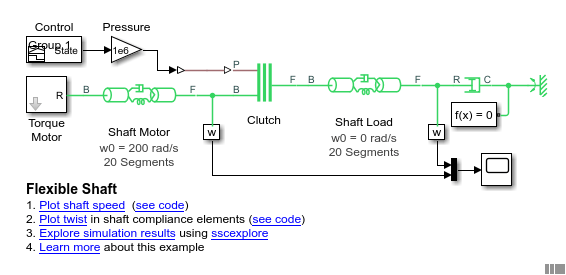
Эта модель содержит два гибких алюминиевых вала, смоделированных с помощью подхода с комчатым параметром. Двигатель управляет валом мотора. Вязкий демпфер соединяется с валом нагрузки. Вязкий демпфер представлен Rotational Damper блок от Simscape> Foundation Library> Mechanical> Rotational Elements библиотека. Блок Foundation Library Rotational Damper не может обнаружить или ответить на отказы.
Симулируйте модель и постройте график результатов.
![]() Скрипт для генерации и графического изображения результатов симуляции
Скрипт для генерации и графического изображения результатов симуляции
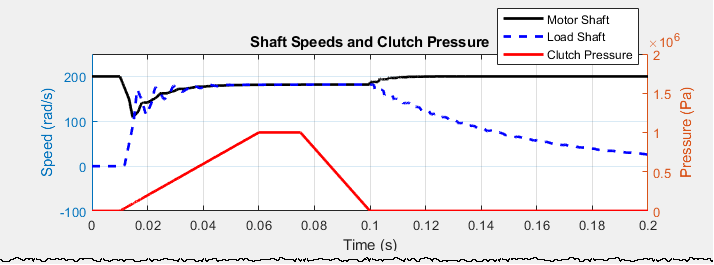
В начале симуляции муфта разблокируется и ведомый вал свободен. Начальная скорость вала мотора является заданной 200 рад/с, и система запускается в установившемся состоянии. Колебания, вызванные зацеплением и отключением муфты, обусловлены гибкостью валов.
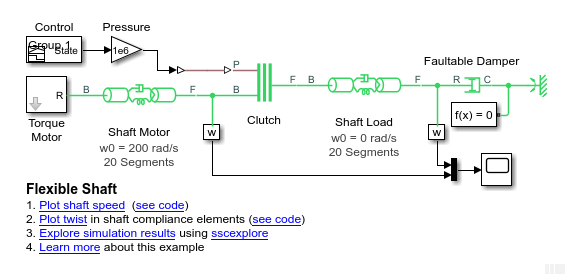
Замените демпфер Simscape Simscape Driveline <reservedrangesplaceholder5> , который находится в Simscape> Driveline> Couplings & Drives> Springs & Dampers библиотека. Пометьте новый блочный Faultable Damper.
![]() Скрипт для замены Rotational Damper блока
Скрипт для замены Rotational Damper блока
Включите основанный на времени отказ и задайте ответ, который включает изменение коэффициента демпфирования и генерацию предупреждения MATLAB. Используйте эти значения для параметров Fault демпфера:
Enable faults — Enabled
Faulted damping coefficient — 10
Enable temporal fault trigger — Enabled
Simulation time for fault event — 0.06
Reporting when fault occurs — Warning
![]() Скрипт для настройки блока Rotational Damper с использованием Timed Fault
Скрипт для настройки блока Rotational Damper с использованием Timed Fault
Симулируйте модель и постройте график результатов.
![]() Скрипт для генерации и графического изображения результатов симуляции
Скрипт для генерации и графического изображения результатов симуляции
Warning: At time 0.060000, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
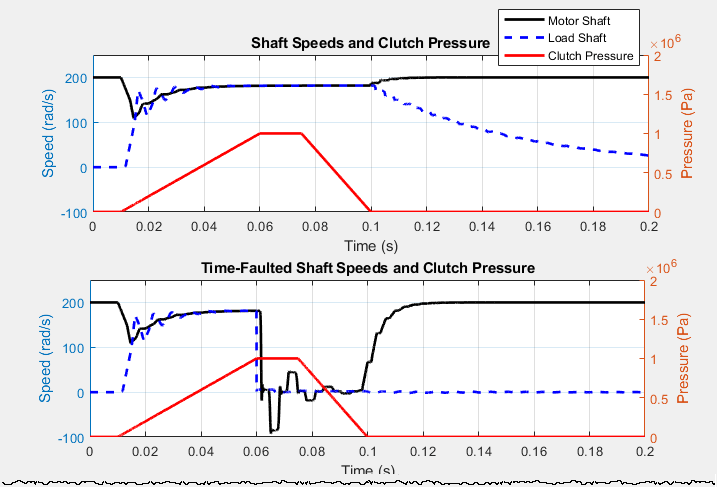
Во времени симуляции t = 0,06 с, время, заданное для отказа, выдается предупреждение. Коэффициент демпфирования падает и замедляет скорость обоих валов.
Включите отказ, основанный на ударе, и задайте ответ, который включает изменение коэффициента демпфирования и генерацию предупреждения MATLAB. Затем симулируйте модель и постройте график новых результатов. Используйте эти значения для параметров Fault демпфера:
Enable faults — Yes
Faulted damping coefficient — 150
Enable temporal fault trigger — Disabled
Enable behavioral fault trigger — Enabled
Maximum permissible acceleration — 50
Maximum number of shocks — 2
Reporting when fault occurs — Warning
![]() Скрипт для настройки блока Rotational Damper с использованием Timed Fault
Скрипт для настройки блока Rotational Damper с использованием Timed Fault
Симулируйте модель и постройте график результатов.
![]() Скрипт для генерации и графического изображения результатов симуляции
Скрипт для генерации и графического изображения результатов симуляции
Warning: At time 0.026048, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
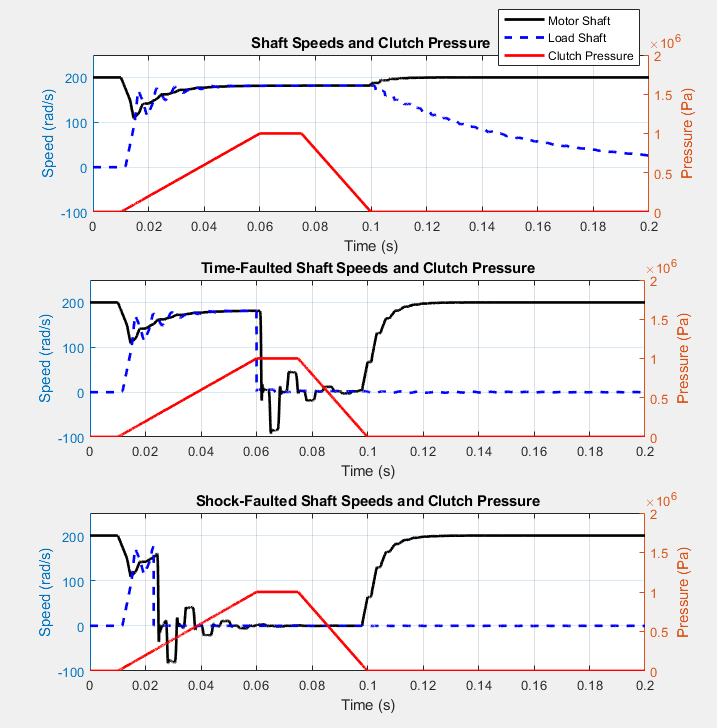
Во времени симуляции t = 0,026 с достигается максимальное количество ударов для заданного ускорения. Сообщается предупреждение, и коэффициент демпфирования увеличивается и замедляет скорость обоих валов.
