Интерфейс между механическими вращательными сетями и шарнирами Simscape Multibody
Simscape/Библиотека фундаментов/Механические/Мультибody Интерфейсы

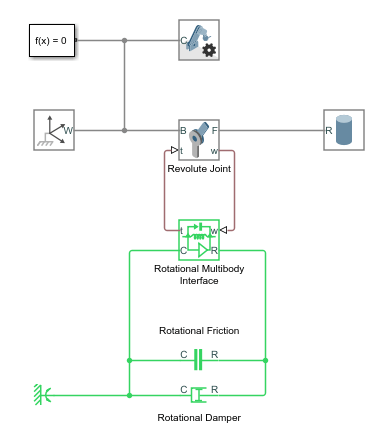
Блок Rotational Multibody Interface реализует интуитивно понятный способ соединения Simscape™ блоков, которые имеют механические вращательные порты с Multibody™ шарнирами Simscape, которые имеют вращательные примитивы. Блоки Simscape, которые могут быть соединены с блоком Rotational Multibody Interface, включают:
Блоки из библиотеки Foundation > Mechanical > Rotational Elements, такие как Rotational Friction или Rotational Damper.
Блоки с портами механического вращений из других библиотек Foundation, таких как Rotational Mechanical Converter (G) или Rotational Mechanical Converter (IL).
Блоки с портами механического вращений от дополнения продуктов, такими как гидравлические приводы от библиотек Simscape Fluids™.
Блок Rotational Multibody Interface соответствует крутящему моменту и относительной скорости вращения на границе раздела. Можно соединить его с любым соединением Simscape Multibody, которое имеет вращательный примитив:
Включите порт w измерения скорости и порт приведения в действие крутящего момента, t на соединении. Если соединение имеет несколько степеней свободы, убедитесь, что выбранное измерение скорости и приведение в действие крутящего момента соответствуют одной и той же степени свободы.
Соедините порты w и t физического сигнала блока Rotational Multibody Interface с портами w и t соединения Simscape Multibody.
Соедините порты C и R блока Rotational Multibody Interface с механической вращательной сетью Simscape.
Для получения подробных пошаговых инструкций смотрите Соединение Simscape-сетей к Simscape Multibody Joints.
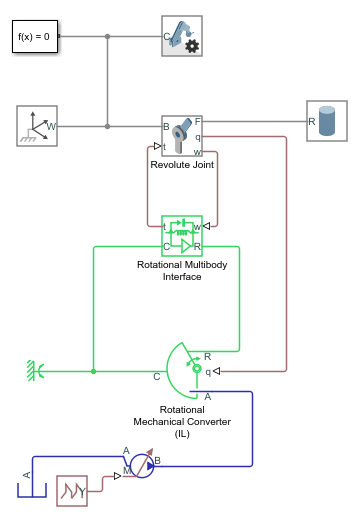
Такие блоки, как Rotational Friction и Rotational Damper, не требуют информации о положении, и для этих блоков достаточно интерфейса, основанного на крутящем моменте и относительной скорости вращения. Другие блоки, как и гидравлические приводы, требуют информации об относительном положении между их портами. Чтобы соединить эти блоки с соединением Simscape Multibody:
Используйте блок Rotational Multibody Interface. Включите порт w измерения скорости и порт приведения в действие крутящего момента, t на соединении, и соедините порты, как описано выше.
Дополнительно включите порт измерения положения, q на шарнире. Если соединение имеет несколько степеней свободы, убедитесь, что измерение положения и скорости и приведение в действие крутящего момента соответствуют одной и той же степени свободы.
На блоке привода включите входной порт q положения путем установки параметра Interface rotation равным Provide input signal from Multibody joint. Соедините входной порт положения, q на блоке привода, с входным портом положения q шарнира Simscape Multibody.
Для моделей с Translational Multibody Interface или Rotational Multibody Interface блоками рекомендуется использовать блоки Simscape Multibody для моделирования масс и инерций. Причина в том, что сети Simscape должны иметь наземный (ссылочный) узел с ускорением всех масс и инерций в сети относительно этого узла. В соединении Simscape Multibody и основа, и последующие системы координат могут ускоряться. Поэтому масса или инерция в сети Simscape, соединенной с соединением, могут не иметь правильной инерционной ссылки.

