Можно смоделировать 3-D механические системы с помощью Simscape™ Multibody™ блоков, представляющих тела, соединения, ограничения, элементы силы и датчики. Эти модели могут также включать сети Simscape, которые представляют гидравлические, электрические, пневматические и другие физические системы. Примерами многодоменных моделей, которые требуют соединений между сетями Simscape и блоками Simscape Multibody, являются:
Механическая система, состоящая из блоков Simscape Multibody, которая питается от гидравлической системы и, следовательно, должна взаимодействовать с гидравлическими приводами из библиотек Simscape Fluids™
Электрическая схема Simscape с двигателем, где двигатель используется для приведения в действие соединения Simscape Multibody
Моделирование нелинейных пружин, демпферов, трения для соединений Simscape Multibody
Simscape-сети являются одномерными, в то время как Simscape Multibody предоставляет 3-D возможности моделирования. Поэтому вы не можете непосредственно соединить механические вращательные и поступательные порты Simscape с блоками Simscape Multibody. Вам нужно установить двунаправленные связи между фрагментами Simscape блока схемы и шарнирами Simscape Multibody, которые включают как измерение, так и приведение в действие, и в некоторых случаях должны также передать информацию о положении:
Сила и относительная скорость должны быть равны между поступательным интерфейсом. Чтобы сделать соединение более устойчивым, измерьте скорость соединения и обеспечьте приведение в действие силы для соединения.
Крутящий момент и относительная скорость вращения должны быть равны на поверхности раздела вращения. Чтобы сделать соединение более устойчивым, определите скорость вращения соединения и обеспечьте вращающий момент для соединения.
Связи Simscape Multibody содержат информацию о положении, в то время как механические соединения Simscape учитывают только относительную скорость. Некоторые блоки Simscape зависят только от скорости, но некоторые блоки Simscape зависят от скорости и положения. Если поведение блока Simscape зависит от положения или угла, его положение или угол должны быть равны положению или углу связанного соединения Simscape Multibody, как во время инициализации, так и во время симуляции.
В любое время, когда вам нужно подключить сеть Simscape к шарниру Simscape Multibody, используйте блок Translational Multibody Interface или Rotational Multibody Interface и выполните шаги в разделе Как использовать блоки интерфейса. Если сеть Simscape содержит блоки, которые зависят от положения или угла, дополнительно выполните шаги в How to Pass Position Information.
Блоки Translational Multibody Interface и Rotational Multibody Interface помогают вам соединить фрагменты Simscape блок-схемы с шарнирами Simscape Multibody:
Блок Translational Multibody Interface соответствует силе и относительной скорости на интерфейсе. Можно соединить его с любым соединением Simscape Multibody, которое имеет призматический примитив. Блок Translational Multibody Interface имеет два механических порта C и R для соединений с сетью Simscape и два порта физического сигнала f и v, которые вы соединяете с соответствующими портами приведения в действие и измерения соединения Simscape Multibody.
Блок Rotational Multibody Interface соответствует крутящему моменту и относительной скорости вращения на границе раздела. Можно соединить его с любым соединением Simscape Multibody, которое имеет вращательный примитив. Блок Rotational Multibody Interface имеет два порта механического вращений, C и R, для соединений с сетью Simscape и два порта физического сигнала, t и w, которые вы соединяете с соответствующими портами приведения в действие и измерения соединения Simscape Multibody.
Эта блок-схема показывает механическую поступательную сеть Simscape, содержащую Translational Friction и Translational Damper блоки. Эта сеть соединяется с блоком Prismatic Joint Simscape Multibody при помощи блока Translational Multibody Interface.
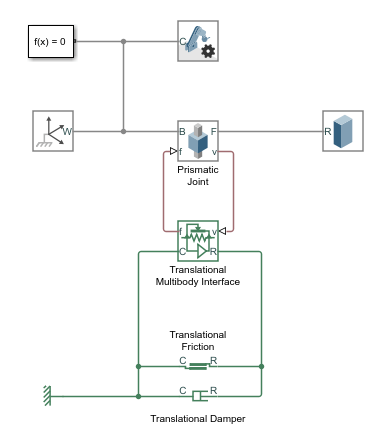
Чтобы использовать блок Translational Multibody Interface:
В блоке Prismatic Joint задайте опции приведения в действие и измерения для призматического примитива соединения:
В разделе Actuation установите Force равным Provided by Input, чтобы включить порт f приведения в действие силы.
В разделе Sensing выберите Velocity, чтобы включить v порта измерения скорости.
Если соединение имеет несколько степеней свободы, убедитесь, что выбранные опции приведения в действие и измерения соответствуют одной и той же степени свободы.
Соедините порты f и v физического сигнала блока Translational Multibody Interface с портами f и v блока Prismatic Joint.
Соедините порты C и R блока Translational Multibody Interface с механической поступательной сетью Simscape. В этом примере соедините порты C и R блоков Translational Friction и Translational Damper с соответствующими портами блока Translational Multibody Interface.
Такие блоки, как Translational Friction и Translational Damper, не требуют информации о положении, и для этих блоков достаточно интерфейса, основанного на силе и относительной скорости. Другие блоки, как и гидравлические приводы, требуют информации об относительном положении или относительном угле между их портами.
Чтобы соединить эти блоки с соединением Simscape Multibody:
Используйте Translational Multibody Interface или Rotational Multibody Interface блок, чтобы соединить сеть Simscape с соединением. Включите порты приведения в действие и измерения скорости на соединении и соедините порты как описано в How To Use Interface Blocks.
Кроме того, активируйте порт p измерения положения (или, для вращательных степеней свободы, порт q) на соединении. Если соединение имеет несколько степеней свободы, убедитесь, что измерение положения соответствует той же степени свободы, что и опции приведения в действие и измерения скорости, выбранные на шаге 1.
На блоке привода включите вход порта p (или, для приводов вращения, порта q), установив параметр Interface displacement (или Interface rotation) равным Provide input signal from Multibody joint. Соедините вход порт блока привода с соответствующим чувствительным портом шарнира Simscape Multibody.
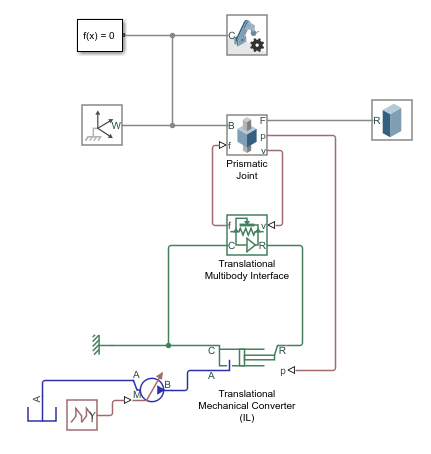
Например, чтобы соединить Translational Mechanical Converter (IL) блок с Prismatic Joint блоком, как показано на блок-схеме:
В блоке Prismatic Joint задайте опции приведения в действие и измерения для призматического примитива соединения:
В разделе Actuation установите Force равным Provided by Input, чтобы включить порт f приведения в действие силы.
В разделе Sensing выберите Velocity, чтобы включить v порта измерения скорости.
В разделе Sensing выберите Position, чтобы включить p порта измерения положения.
Если соединение имеет несколько степеней свободы, убедитесь, что выбранные опции приведения в действие и измерения соответствуют одной и той же степени свободы.
Соедините порты f и v физического сигнала блока Translational Multibody Interface с портами f и v блока Prismatic Joint.
Соедините порты C и R блока Translational Multibody Interface с портами C и R блока Translational Mechanical Converter (IL).
В блоке Translational Mechanical Converter (IL) установите параметр Interface displacement равным Provide input signal from Multibody joint, чтобы включить входной порт физического сигнала p.
Соедините порт p измерения положения соединения с входным портом p физического сигнала блока Translational Mechanical Converter (IL).
Подробный пример передачи информации о положении от соединения Мультитела к гидравлическим приводам, с учетом различной механической ориентации приводов, см. в разделе Моделирование привода двойного действия.
Для моделей с Translational Multibody Interface или Rotational Multibody Interface блоками рекомендуется использовать блоки Simscape Multibody для моделирования масс и инерций. Причина в том, что сети Simscape должны иметь наземный (ссылочный) узел с ускорением всех масс и инерций в сети относительно этого узла. В соединении Simscape Multibody и основа, и последующие системы координат могут ускоряться. Поэтому масса или инерция в сети Simscape, соединенной с соединением, могут не иметь правильной инерционной ссылки.
Rotational Multibody Interface | Translational Multibody Interface
