Маятник является самой простой механической системой, которую вы можете смоделировать. Эта система содержит два тела, ссылку и фиксированный центр, соединенный шарнирным соединением. В этом руководстве вы моделируете и симулируете маятник с помощью пользовательского блока звена, созданный вами в Модели Простое звено. Блок Revolute Joint обеспечивает вращательную степень свободы между звеном и лабораторной системой координат.
В MATLAB® в командной строке введите smnew. Откроются Simscape™ Multibody™ библиотека блоков и шаблон модели с обычно используемыми блоками.
Удалите блоки Simulink-PS Converter, PS-Simulink Converter, Scope и Твердое Преобразование. Они вам не нужны в этом руководстве.
Добавьте в модель пользовательский блок Простое звено, созданный в Model a Простое Звено.
Добавьте блок Revolute Joint к модели. Этот блок можно найти в библиотеке Simscape > Multibody > Joints. Этот блок обеспечивает одну вращательную степень свободы между его системами координат портов.
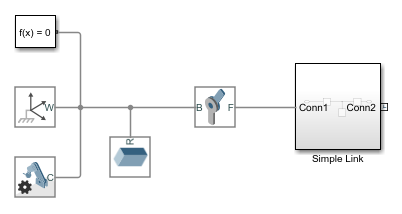
Соедините блоки как показано на рисунке. Ориентация портов Блока соединений Revolute становится важным, когда вы задаете положения шарниров, предписываете входные параметры или шарнир динамические переменные. Блок Revolute Joint интерпретирует каждую величину как примененную к последующей системе координат относительно базовой системы координат, поэтому переключение портов соединения может повлиять на сборку блока и симуляцию.
В Диалоговое окно блока Solid задайте следующие параметры. Этот блок жестко соединяется с лабораторной системой координат и, следовательно, не влияет на динамику модели. Можно оставить параметры инерции в их значениях по умолчанию.
| Параметр | Значение | Модули |
|---|---|---|
| Geometry> Dimensions | [4 4 4] | Изменение на cm |
| Graphic> Visual Properties> Color | [0.80 0.45 0] | Не применяется |
Блок Revolute Joint использует общую ось Z основы и последующей системы координат в качестве оси поворота соединения. Чтобы гарантировать колебание маятника под действием силы тяжести, измените вектор силы тяжести, чтобы он больше не совпал с осью Z. Для этого в диалоговом окне Mechanism Configuration установите параметр Uniform Gravity > Gravity равным [0 -9.81 0].
Можно задать требуемый угол поворота шарнира с помощью меню State Targets в диалоговом окне блока Revolute Joint. Для этого выберите State Targets > Position и введите требуемый угол поворота шарнира. Для этого руководства можно оставить угол в значении по умолчанию, которое соответствует горизонтальному начальному положению маятника.
Откройте параметры конфигурации. На вкладке Modeling нажмите Model Settings.
На вкладке Solver установите параметр Solver равным ode15s (stiff/NDF). Этот решатель является рекомендуемым выбором для физических моделей.
Установите Max step size значение 0.01 и нажмите OK. Небольшой шаг увеличивает точность симуляции и создает более плавную анимацию в Mechanics Explorer. Небольшие шаги могут оказать пагубный эффект на скорость симуляции, но, в такой простой модели, значение 0.01 обеспечивает хороший баланс между скоростью симуляции и точностью.
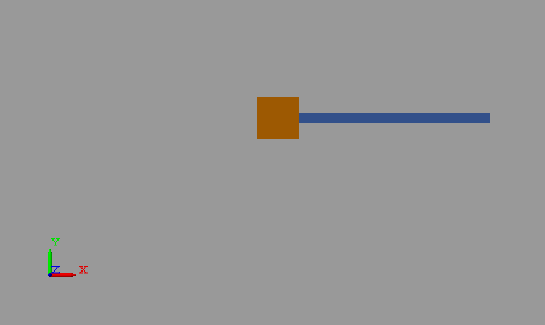
Обновите блок. На вкладке Modeling нажмите Update Model. В Mechanics Explorer откроется 3-D вид модели в ее начальном строении.
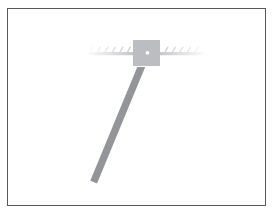
На панели инструментов Mechanics Explorer проверьте, что для параметра View convention задано значение Y up (XY Front). Этот вид представления гарантирует, что сила тяжести будет вертикально выровнена на вашем экране. Выберите стандартную кнопку просмотра, чтобы обновить отображение Mechanics Explorer. Рисунок показывает вид спереди модели. Сохраните настройки визуализации, нажав кнопку Save Explorer configuration to model.![]()
Запустите симуляцию. Mechanics Explorer воспроизводит основанную на физике анимацию модели маятника.
Сохраните модель в удобной папке под именем simple_pendulum. Вы повторно используете эту модель в руководстве «Анализ простого маятника».
