В этом руководстве вы исследуете различные силы и крутящие моменты, которые можно добавить к модели. Затем, используя блоки с возможностью измерения движения, вы анализируете полученную динамическую характеристику модели. Конечным результатом является набор временных и фазовых графиков, по одному для каждой комбинации сил и крутящих моментов. Вы создаете эти графики с помощью MATLAB® команды с Simscape™ Multibody™ выходами движения в качестве аргументов.
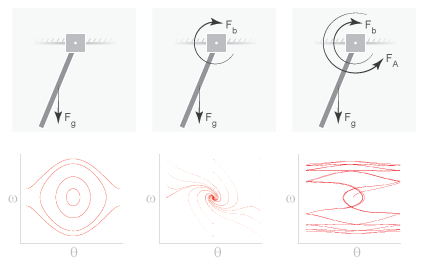
Вашей начальной точкой является модель математического маятника, которую вы создали в Модели Простого Маятника. Добавляя силы и крутящие моменты к этой модели, вы постепенно изменяете маятник с невысокого и свободного на демпфированный и управляемый. Применяемые силы и крутящие моменты включают:
Сила свободного падения (F g) - Глобальная сила, действующая на каждое тело в прямой пропорции к его массе, которую вы задаете в терминах вектора ускорения g. Этот вектор задается с помощью блока Mechanism Configuration.
Демпфирование соединения (F b) - Внутренний крутящий момент, между маятником и фиксатором соединения, который вы параметрируете в терминах линейного коэффициента демпфирования. Этот параметр задается с помощью блока Revolute Joint, который соединяет маятник с фиксатором шарнира.
Крутящий момент приведения в действие (F A) - Приводной крутящий момент, между маятником и фиксатором соединения, который вы предписываете непосредственно как физический сигнал Simscape. Вы предписываете этот сигнал с помощью блока Revolute Joint, который соединяет маятник с фиксатором соединения.
Откройте модель simple_pendulum, которую вы создали в руководстве Модель Простого Маятника.
В меню Sensing Диалогового окна блока Revolute Joint выберите следующие переменные:
Position
Velocity
Блок открывает два дополнительных порта физического сигнала, маркированные q и w, которые выводят угловое положение и скорость маятника относительно мировой системы координат.
Добавьте следующие блоки к модели. Вы используете их здесь, чтобы вывести положение и скорость соединений в базовое рабочее пространство MATLAB.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | PS-Simulink Converter | 2 |
| Simulink> Sinks | To Workspace | 2 |
Измените параметры Variable name в диалоговых окнах блока To Workspace на q и w. Эти переменные облегчают идентификацию переменных joint, которые блоки To Workspace выводят во время симуляции - положение, через порт q блока Revolute Joint и скорость, через порт w блока Revolute Joint.
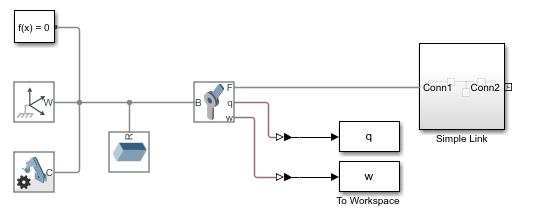
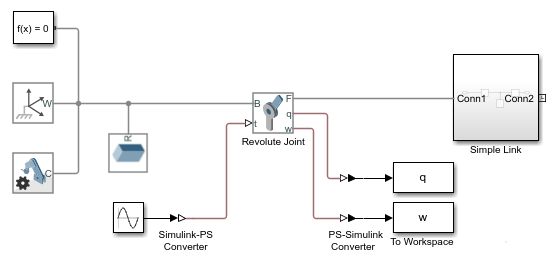
Соедините блоки как показано на рисунке. Убедитесь, что To Workspace блок с именем переменной q соединяет через блок PS-Simulink Converter с портом q блока Revolute Joint, и этот блок To Workspace с именем переменной w соединяется с блоком Revolute Joint w.
Сохраните модель под другим именем, например simple_pendulum_analysis, в удобной папке.
Запустите симуляцию. В Mechanics Explorer откроется 3-D анимация модели математического маятника.
Постройте график положения и скорости соединений относительно времени, например, путем ввода следующего кода в командной строке MATLAB:
figure; % Open a new figure hold on; plot(q); % Plot the pendulum angle plot(w); % Plot the pendulum angular velocity
Постройте график скорости вращения соединения относительно углового положения, например, путем ввода следующего кода в командной строке MATLAB.
figure; plot(q.data, w.data);
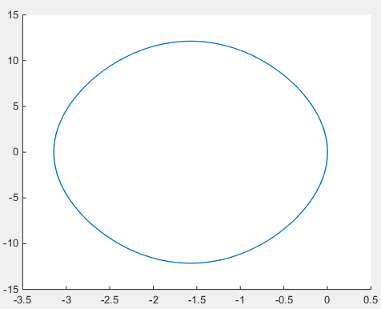
Попробуйте симулировать модель с использованием разных стартовых углов. Можно изменить начальный угол в меню State Targets > Position Диалогового окна блока Revolute Joint. Рисунок показывает составную фазу для начальных углов -80 , -40 , 0 , 40 и 80 степеней.
В Диалоговое окно блока Revolute Joint установите Internal Mechanics > Damping на 8e-5 (Н * м )/( град/с). Коэффициент демпфирования вызывает рассеивание энергии во время движения, что приводит к постепенному распаду амплитуды колебаний маятника.
Гарантируйте, что State Targets> Position> Value установлен в 0 град.
Запустите симуляцию.
Постройте график положения и скорости соединений относительно времени. Для этого в командной строке MATLAB можно ввести этот код:
figure; hold on; plot(q); plot(w);
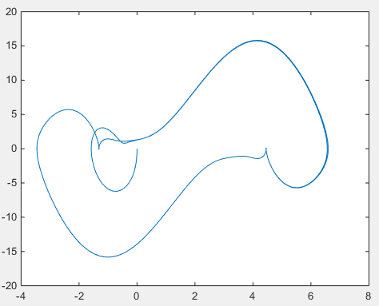
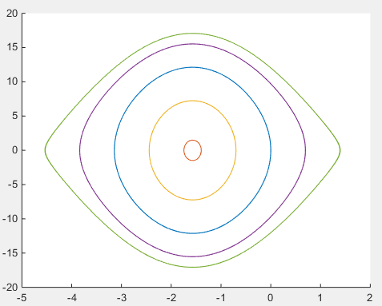
Постройте график фазы соединения. Для этого в командной строке MATLAB можно ввести этот код:
figure; plot(q.data, w.data);
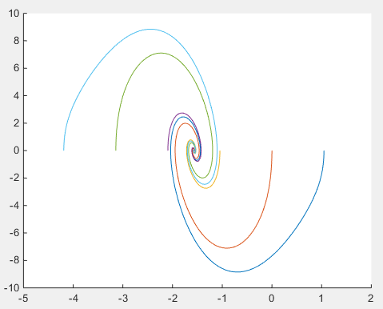
Попробуйте симулировать модель с использованием разных стартовых углов. Можно изменить начальный угол в меню State Targets > Position Диалогового окна блока Revolute Joint. Рисунок показывает составную фазу для начальных углов -240 , -180 , -120 , -60 , 0 и 60 степеней.
В Диалоговое окно блока Revolute Joint установите Actuation > Torque на Provided by Input. Блок выставляет входной порт физического сигнала, который можно использовать, чтобы предписать крутящий момент приведения в действие соединения.
Добавьте эти блоки к модели.
| Библиотека | Блок |
|---|---|
| Simscape> Utilities | Simulink-PS Converter |
| Simulink> Sources | Sine Wave |
Блок Sine Wave обеспечивает периодический вход крутящего момента в качестве Simulink® сигнал. Блок Simulink-PS Converter преобразует сигнал Simulink в физический сигнал Simscape, совместимый с блоками Simscape Multibody.
Соедините блоки как показано на рисунке.
В диалоговое окно блока синусоидальной волны установите Amplitude равным 0.06. Эта амплитуда соответствует крутящему моменту приведения в действие, колеблющемуся между -0,06 Н и 0,06 Н.
В Диалоговом окне блока Revolute Joint убедитесь, что для State Targets Position > Value > задано значение 0 град.
Запустите симуляцию.
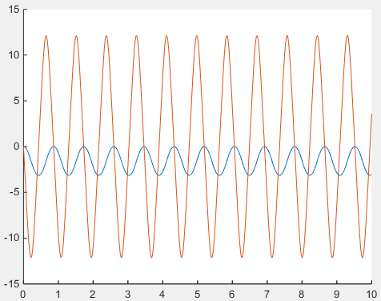
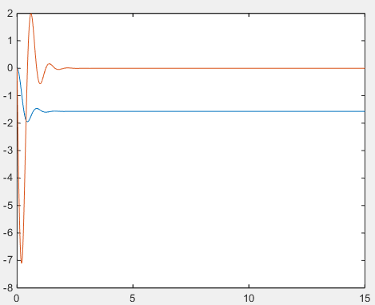
Постройте график положения и скорости соединений относительно времени. Для этого в командной строке MATLAB можно ввести этот код:
figure; hold on; plot(q); plot(w);
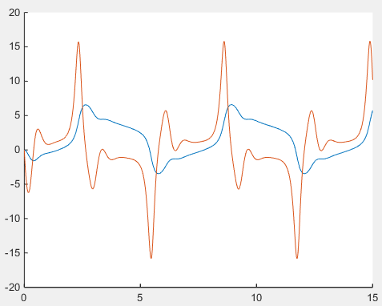
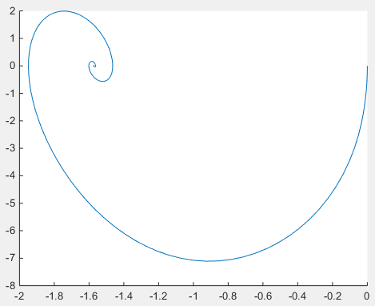
Постройте график фазы соединения. Для этого в командной строке MATLAB можно ввести этот код:
figure; plot(q.data, w.data);