По умолчанию блок Solid предоставляет только порт системы координат, помеченный R. В простых формах, таких как Brick Solid, Spherical Solid и Cylindrical Solid, источник системы координат совпадает с центром масс твердого тела. То же самое, как правило, не относится к более сложным Extruded Solid и Revolved Solid формам, как и к импортированным твердым формам.
Опорная система координат тела
Во многих приложениях опорная система координат тела недостаточна для соединения соединений и ограничений или для применения сил и крутящих моментов. В таких случаях можно создать новые системы координат, внешние по отношению к блоку Solid с помощью блока Твердого Преобразования. Этот блок позволяет вам задать новую систему координат путем численного преобразования перемещения и вращения.
Альтернативным подходом, который часто более интуитивно понятен, является создание новых систем координат непосредственно в Диалоговое окно блока Solid с помощью интерфейса создания систем координат. Этот интерфейс позволяет вам задавать новые системы координат в интерактивном режиме путем выравнивания начала системы координат и осей с геометрическими функциями, такими как плоскости, линии и точки.
Ссылочные и пользовательские системы координат твердого тела
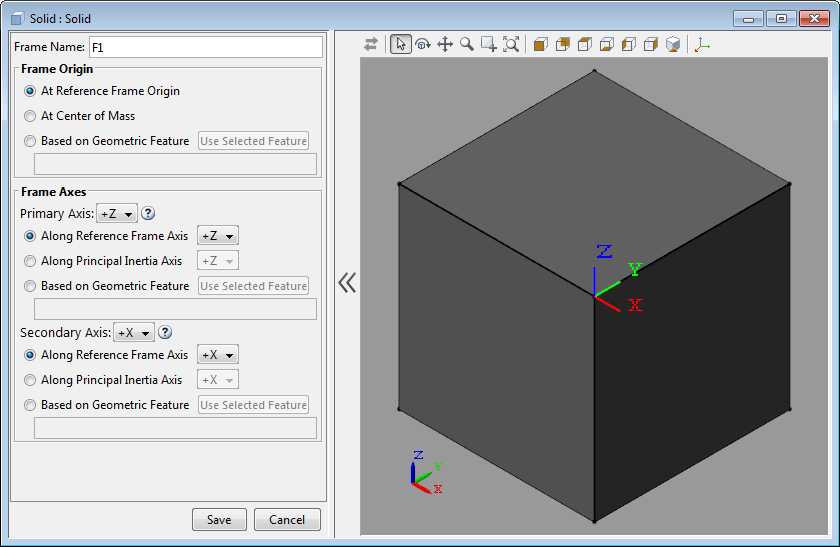
Интерфейс создания кадров доступен через Диалоговое окно блока Solid. Чтобы открыть интерфейс, в Frames расширяемой области, нажмите кнопку Create. ![]() Если вы измените любой из параметров блоков, необходимо сначала обновить твердую визуализацию, выбрав кнопку Update Visualization.
Если вы измените любой из параметров блоков, необходимо сначала обновить твердую визуализацию, выбрав кнопку Update Visualization.![]()
Можно задать системы координат на основе геометрических функций твердого тела или выбрать две системы координат - опорную и основную системы инерции. Опорная система координат является системой координат тела по умолчанию. Основной системой инерции является система источников которой совпадает с центром масс и оси которой совпадают с главными осями тела.
Системы координат, заданные геометрическими функциями, специфичны для форм, к которым относятся функции. Если центр системы координат совпадает с вершиной кирпича, новая система координат действительна только для той конкретной формы. При изменении фигур необходимо отредактировать или удалить новую систему координат, поскольку геометрические функции, от которых она зависит, больше не существуют.
Интерфейс создания фреймов имеет три раздела для определения следующего:
Система координат
Основная ось
Вторичная ось
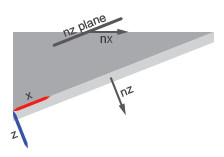
Основная ось ограничивает возможные направления остальных двух осей. Эти оси должны лежать в нормальной плоскости основной оси. Если ось или геометрическая функция, используемый для определения вторичной оси, не лежит на этой плоскости, вторичная ось является проекцией этой оси или функции на нормальную плоскость.
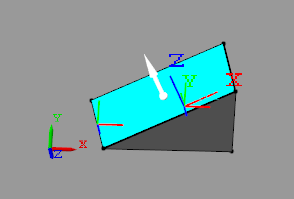
Рисунок показывает вид сверху трехсторонней экструзии, которую вы моделируете в этом руководстве. Вы выравниваете первичную ось (z) с вектором nz нормали поверхности и вторичную ось (x) с вектором nx линии. Поскольку nx не нормаль к основной оси, вторичная ось является проекцией nx на нормальную плоскость основной оси.
Создайте систему координат на твердом теле с помощью интерфейса создания рамок. Твердая форма является общим выдавливанием с тремя неравными сторонами. Эта форма помогает продемонстрировать различие между основной и вторичной осями системы координат, которое вы задаете в интерфейсе создания системы координат.
Из библиотеки Элементы добавьте один Extruded Solid блок в новую модель. Блок Extruded Solid предоставляет собственную утилиту визуализации. Вам не нужно обновлять блок, чтобы визуализировать твердую форму или ее системы координат.
В диалоговом окне Extruded Solid блока задайте эти параметры.
| Параметр | Значение |
|---|---|
| Geometry> Cross-section | [0,0;1,0;1,0.5] |
На панели инструментов визуализации нажмите кнопку Update Visualization. ![]() Визуализация панели обновляется с помощью заданного трехстороннего выдавливания.
Визуализация панели обновляется с помощью заданного трехстороннего выдавливания.
Нажмите кнопку Toggle visibility of frames. На панели визуализации показаны все системы координат в твердом теле. На данной точке твердое тело имеет одну систему координат - свою систему отсчета. Источник опорной системы координат совпадает с координатой поперечного сечения [0,0] в средней плоскости экструзии.
В Frames расширяемой области диалогового окна Extruded Solid блока нажмите кнопку Create. ![]() Блок Solid открывает интерфейс создания фреймов.
Блок Solid открывает интерфейс создания фреймов.
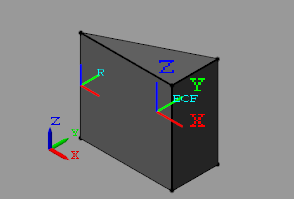
В параметре Frame Name введите ECF (сокращение от «Выдавливание угловой системы координат»). Имя системы координат определяет новую систему координат на панели визуализации Твердых блоков. Он также появляется как метка порта системы координат на блоке Solid.
В разделе Frame Origin выберите At Center of Mass. Панель визуализации обновляется новой системой координат в центре массы тела. Эта система координат имеет ориентацию системы координат по умолчанию. ECF метки определяет новые системы координат.
Экспериментируйте с другими местоположениями координат системы координат. Определите положение источника с помощью одной из вершин выдавливания.
В разделе Frame Origin выберите Based on Geometric Feature. Эта опция позволяет вам выбрать точку или центр плоскости или линии в качестве начала системы координат.
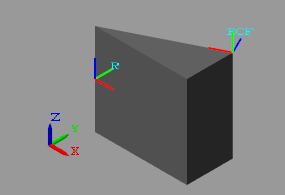
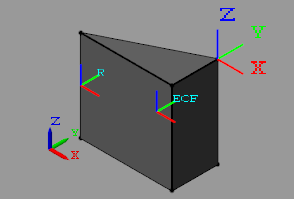
На панели визуализации выберите вершину, показанную на рисунке. Вершина находится в верхней плоскости выдавливания. Убедитесь, что точка представления установлена на Isometric. В области Frame Origin убедитесь, что вершина названа Location of top point 3.
В разделе Frame Origin нажмите кнопку Use Selected Feature. Визуализация панели обновляется с началом системы координат в выбранном углу.
Основная ось ограничивает оставшиеся две оси, чтобы они лежали на ее нормальной плоскости. В этом смысле первичная ось играет доминирующую роль в установке ориентации системы координат. Сделайте первичную ось нормальной к поверхности, которая содержит гипотенузу поперечного сечения:
В области Frame Axes под Primary Axis выберите Based on Geometric Feature. Направление, которое вы задаете на следующих шагах, является направлением основной оси по умолчанию +Z.
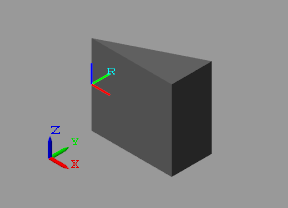
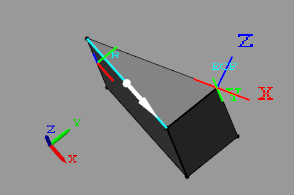
На панели визуализации поверните тело и выберите показанную поверхность. Панель визуализации подсвечивает поверхность и показывает ее вектор normal. В области Frame Axes под Primary Axis убедитесь, что поверхность названа Surface normal of side surface 3.
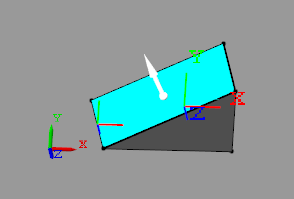
В области Frame Axes под Primary Axis нажмите кнопку Use Selected Feature. Панель визуализации обновляется осью z системы координат ECF, показанной темно-синим цветом, параллельно вектору нормали выбранной поверхности.
Вторичная ось завершает определение новой системы координат. В сочетании с основной осью вторичная ось полностью ограничивает направление третьей оси. Вторичная ось сама по себе ограничена, чтобы лежать на нормальной плоскости первичной оси. Чтобы увидеть эффекты этого ограничения, задайте вторичную ось на основе линии, не перпендикулярной основной оси:
В области Frame Axes установите параметр Secondary Axis равным -X. Направление, которое вы задаете на следующих шагах, это направление -X ось.
В области Frame Axes под Secondary Axis выберите Based on Geometric Feature.
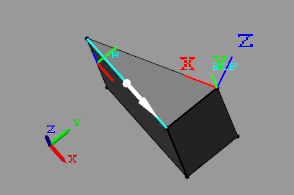
На панели визуализации поверните твердое тело и выберите показанную линию. В области Frame Axes под Secondary Axis убедитесь, что эта линия названа Curve direction of top curve 1.
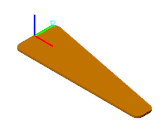
Нажмите кнопку Use Selected Feature. Панель визуализации обновляется с учетом оси X системы координат, показанной красным цветом, частично выровненной по выбранной линии.
Эти две оси не выровнены полностью, так как выбранная линия не лежит на нормальной плоскости основной оси. Поэтому вторичная ось является проекцией выбранной линии на нормальную плоскость основной оси.
Чтобы сохранить систему координат, которую вы определили, и зафиксировать ее в модели:
Нажмите кнопку Save. На панели визуализации отображается твердое тело с окончательной версией заданной системы координат.
В главном интерфейсе Диалогового окна блока Solid выберите OK или Apply. Блок Solid фиксирует новую систему координат в модели и отображает новый порт системы координат, помеченный заданным системой координат именем.
