Системы координат являются тройками осей, которые кодируют данные о положении и ориентации в 3-D модели мультитела. Каждая тройка состоит из трех перпендикулярных осей, которые пересекаются в источник. Источник определяет положение системы координат и оси определяют ориентацию системы координат Оси закодированы по цвету, с x осью в красном цвете, y ось в зеленом цвете и z ось в синем цвете.
Каждый твердый компонент имеет одну или несколько локальных систем координат, к которым он жестко прикреплен. Путем позиционирования и ориентации систем координат компонентов, вы позиционируете и ориентируете сами компоненты. Это роль систем координат в модели - чтобы вы могли задать пространственные отношения между компонентами.
Порт системы координат идентифицирует локальную систему координат в компоненте. Для примера порт R-системы координат твердого тела блока идентифицирует локальную систему отсчета твердого тела. Каждый блок имеет один или несколько портов системы координат, которые вы соединяете в порядок, чтобы найти связанные компоненты в пространстве. Рисунок показывает порты опорной системы координат на нескольких блоках Body Elements.

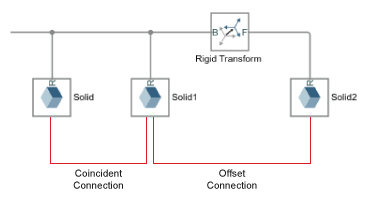
Связи между портами системы координат определяют пространственные отношения между их системами координат. Прямая линия связи делает соединенные системы координат совпадающими в пространстве. Блок Твердого Преобразования устанавливает вращательное и поступательное смещения между системами координат. Рисунок показывает примеры совпадающих и смещенных соединений системы координат.
Совпадение между твердыми системами координат само по себе не составляет совпадение между твердыми геометриями. Пространственное расположение двух стереометрия зависит не только от пространственного расположения соответствующих опорных систем координат, но и от того, как они заданы относительно этих систем координат.
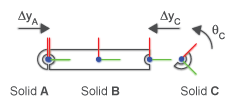
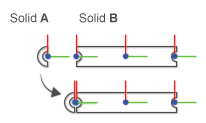
Если две геометрии отличаются друг от друга или если их положения и ориентации относительно их систем координат отличаются друг от друга, то совмещение систем координат приведет к смещению твердых геометрий. На рисунке соединение системы координат Solid A к левой системе координат Solid B соединяет твердые тела таким образом, чтобы их геометрия смещалась друг от друга.
Блок Solid обеспечивает интерфейс создания системы координат, который можно использовать для создания новых, пользовательских систем координат. Вы можете позиционировать и ориентировать пользовательскую систему координат, используя такие геометрические функции, как вершины, ребра и грани. Более удобно с точки зрения инерции можно сделать то же самое с помощью центра масс и трех главных осей твердого тела.
Создайте пользовательскую систему координат с помощью интерфейса создания системы координат блока File Solid. Затем поместите начало системы координат в центр масс и выровняйте оси системы координат по основным осям инерции. Результатом является система координат, которая совпадает с основной системой координат - такой, в которой матрица инерции диагональна, а продукты инерции равны нулю.
В командной строке MATLAB введите smdoc_lbeam_inertia. Откроется модель с твердым телом, обладающим формой L-образной балки.
В диалоговом окне File Solid блока нажмите кнопку Create Frame. Это < reservedrangesplaceholder0 > диалоговое окно блока переключается на вид создания системы координат.
Измените параметр Frame Name на P (для «Основная система координат»). Панель визуализации и порт системы координат используют эту метку для идентификации вашей новой системы координат.
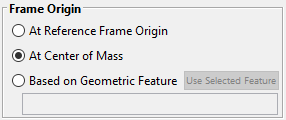
В разделе Frame Origin выберите переключатель, помеченный At Center of Mass.
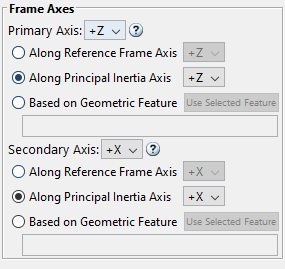
Под Frame Axes> Primary Axis и Frame Axes> Secondary Axis, выберите маркированный Along Principal Inertia Axis переключателя. Примите опции оси по умолчанию (+Z и +X, соответственно) и нажатие кнопки Save. Диалоговое окно блока переключается назад на основной (параметрический) вид.
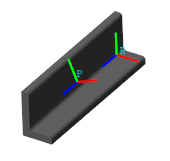
На панели инструментов визуализации нажмите кнопку Toggle visibility of frames. На панели визуализации показаны системы координат тела, включая ваш новый пользовательский кадр, P.
Вращательное и поступательное смещения между системами координат называются преобразованиями. Если преобразования постоянны во времени, они называются твердыми. Твердые преобразования позволяют вам фиксировать относительные положения и ориентации компонентов в пространстве, например, собирать твердые тела в тела.
![]()
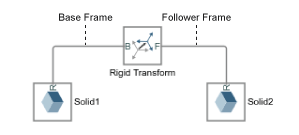
Вы используете блок Rigid Transform, чтобы задать вращательное, поступательное, или смешанное твердое преобразование между системами координат. Преобразования являются направленными. Они устанавливают поворот и перемещение системы координат, известной как последующая система координат, относительно системы координат, известной как основа.
Метки порта кадра на блоке Rigid Transform идентифицируют основу и последующие системы координат. Система координат, соединенная с портом B, служит основой. Система координат, соединенная с портом F, служит в качестве последующей системы координат. Противоположное соединение портов меняет направление, в котором применяется преобразование системы координат.
Вы можете задать преобразование с помощью различных методов. Для вращательных преобразований они включают пары угол-ось, матрицы поворота и последовательности поворота. Для поступательных преобразований они включают векторы поступательного смещения, заданные в Декартовых или цилиндрических системах координат.
Если вращательное и поступательное преобразования равны нулю, соединенные системы координат совпадают в пространстве. Это отношение известно как тождества, и оно эквивалентно прямой линии связи между портами системы координат - т.е. одному без блока Rigid Transform.
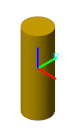
Можно визуализировать системы координат и изучить преобразования между системами координат с помощью панели визуализации Твердых блоков или Mechanics Explorer. Используйте панель визуализации Твердых блоков, чтобы изучить системы координат одного твердого элемента. Нажмите кнопку Toggle visibility of frames на панели инструментов визуализации, чтобы показать все твердотельные системы координат.
A Системы координат on a Solid
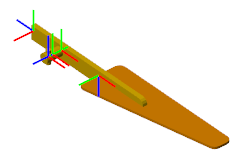
Используйте Mechanics Explorer, чтобы визуализировать системы координат более чем одного твердого элемента - например, в составных телах, подсистемах мультитела или полных моделях мультитела. Выберите View > Show Frames в меню Mechanics Explorer, чтобы показать все системы координат. Выберите узел на панели древовидного представления, чтобы отобразить только те системы координат, которые относятся к выбранному компоненту.
Системы координат на теле
Этот пример показывает, как сместить два твердых тела относительно друг друга путем определения преобразования системы координат между твердыми опорными системами координат. В нем показаны три типа преобразований: перемещение, вращение и комбинированное преобразование.
Создайте модель с двумя твердыми телами
В MATLAB® в командной строке введите smnew. Откроется Simscape™ Multibody™ шаблон модели с обычно используемыми блоками.
Удалите Simulink-PS Converter, PS-Simulink Converter и Scope блоки, потому что они не используются в этом примере.
Показать имена блоков Rigid Transform и Brick Solid. Щелкните правой кнопкой мыши блоки и выберите Format > Show Block Name > On.
Создайте копию блока Brick Solid и переименуйте блоки Brick Solid в блоки Base и Follow.
Соедините оставшиеся блоки как следующий рисунок.
![]()
Запустите модель. Mechanics Explorer откроется визуализацией модели. В Mechanics Explorer нажмите кнопку Isometric view.
![]()
На панели древовидного представления щелкните узлы Base и Follower. На панели визуализации показаны системы координат двух блоков Brick Solid, которые показывают, что они совпадают в пространстве.
![]()
Применить перевод
В этом разделе показано, как применить перемещение к последующей системе координат при помощи блока Rigid Transform.
Соедините блок Rigid Transform между двумя блоками Brick Solid.
![]()
Дважды кликните Rigid Transform блок. В своем диалоговом окне установите:
Translation > Method к Cartesian.
Translation > Offset к [1 1 0] m. Элементы массива являются смещениями перемещения вдоль базовых x, y и z -осей.
Нажмите кнопку OK, чтобы сохранить настройки и закрыть диалоговое окно Твердое преобразование.
Нажмите Update diagram кнопку в Mechanics Explorer, чтобы обновить модель.
На панели древовидного представления щелкните узел Твердое преобразование, чтобы отобразить базовую и последующую системы координат.
![]()
Применить вращение
В этом разделе показано, как применить поворот вокруг оси x к последующей системе координат с помощью блока Rigid Transform.
В Rigid Transform диалогового окна блока установите:
Translation > Method к None. Здесь не указан перевод.
Rotation > Method к Standard Axis.
Rotation > Axis к +X. x -ось является осью вращения.
Rotation > Angle к 45 град.
Нажмите OK и обновите блок.
На панели древовидного представления щелкните узел Rigid Transform. Следующий рисунок показывает процесс и конечный результат вращения. В конечный результат подсвечивается твердое тело кирпича толкателя.
![]()
Применение комбинированного преобразования
В этом разделе показано, как применить комбинированное преобразование, которое включает перемещение и поворот к последующей системе координат при помощи блока Rigid Transform.
В Rigid Transform диалогового окна блока установите:
Translation > Method к Cartesian.
Translation > Offset к [1 1 0].
Rotation > Method к Standard Axis.
Rotation > Axis к +X. x -ось является осью вращения.
Rotation > Angle к 45 град.
Нажмите OK и обновите блок.
На панели древовидного представления щелкните узел Rigid Transform. Следующий рисунок показывает процесс и конечный результат комбинированного преобразования.
![]()
Когда и вращательное, и поступательное преобразования заданы в Rigid Transform блоке, блок всегда сначала применяет перемещение к последующей системе координат. Переводы описывают, как последующая система координат перемещается относительно ее базовой системы координат. Любые повороты вокруг осей базовой системы координат всегда соответствуют осям перемещаемой системы координат.
