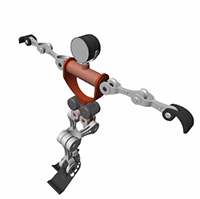
URDF, или Unified Robotics Description Формата - XML- спецификация, используемый в научных кругах и промышленности для моделирования систем мультитела, таких как руки роботов-манипуляторов для производства сборочных линий и аниматронных роботов для парков развлечений. URDF особенно популярен у пользователей ROS (Robotics Operating System) - среды, предлагающей стандартную поддержку моделей URDF. Можно импортировать модели URDF в Simscape™ Multibody™ окружения, для примера, для симуляции, анализа и системы управления задач. Смотрите Humanoid Robot рекомендуемый пример для простого примера использования.
Модель человекоподобного робота URDF
Как и другие типы XML- файлы, URDF файлов включать различные элементы XML, такие как <robot>, <link>, <joint>, вложенный в иерархические структуры, известные как XML-деревья. Для примера, <link> и <joint> элементы называются дочерними элементами <robot> элемент и, наоборот, <robot> элемент родительский элемент <link> и <joint> элементы.
<robot> <link> ... </link> <link> ... </link> <joint> ... </joint> </robot>
Дочерние элементы, такие как <link> и <joint> под <robot>, может в свою очередь иметь собственные дочерние элементы. Для примера, <link> элемент имеет дочерние элементы <inertial> и <visual>. The <visual> элемент имеет дочерние элементы <geometry> и <material>. И <material> элемент имеет дочерний элемент <color>. Такие цепи дочерних элементов необходимы для определения свойств и поведения родительских элементов.
<robot> <link> <inertial> ... </inertial> <visual> <geometry> ... </geometry> <material> <color /> </material> </visual> </link> ... </robot>
В сложение с дочерними элементами XML-элементы в модели URDF могут иметь атрибуты. Для примера, <robot>, <link>, и <joint> все элементы имеют атрибут <name>- строка, которая служит для идентификации элемента. The <color> элемент имеет атрибут rgba- числовой массив со значениями красного, зеленого, синего и альфа (или непрозрачности) цвета ссылки. Атрибуты, такие как эти, помогают полностью определить элементы модели.
<robot name = "linkage"> <link name = "root link"> <inertial> ... </inertial> <visual> <geometry> ... </geometry> <material> <color rgba = "1 0 0 1" /> </material> </visual> </link> ... </robot>
URDF- ссылок соединяются через соединения в иерархических структурах, не похожих на те, которые формируются путем вложения XML- элементов в файл URDF. <joint> элементы принудительно применяют эти иерархии посредством <parent> и <child> элементы, которые идентифицируют одну ссылку как родительский элемент, а другое как дочернее. Родительские ссылки могут сами быть дочерними - и дочерними - родительскими элементами - других ссылок в модели.
<parent> и <child> Элементы joint
<robot name = "linkage"> <joint name = "joint A ... > <parent link = "link A" /> <child link = "link B" /> </joint> <joint name = "joint B ... > <parent link = "link A" /> <child link = "link C" /> </joint> <joint name = "joint C ... > <parent link = "link C" /> <child link = "link D" /> </joint> </robot>
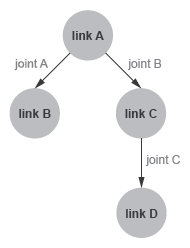
Соединения между ссылками можно визуализировать с помощью схемы, известной как connectivity graph. Рисунок показывает пример. Круги обозначают ссылки, а стрелы - шарниры. Корни стрелы идентифицируют родительские узлы и стрелу советов дочерних узлов. Графиков связности раскрывает топологию базовой модели - здесь простая древовидная кинематическая структура с двумя ветвями.
График связности древовидной кинематической структуры
Топология модели важна в URDF. Графиков связности модели может иметь форму только древовидной кинематической структуры - кинематической цепи, разветвленной или неразветвленной, которая всегда открыта. Кинематические замкнутые цепи, каждая замкнутая цепь, образованная соединением концов разомкнутой цепи, запрещены. Это ограничение влияет на то, как <link> элементы могут соединяться в модели URDF.
Ограничение переводится в следующее правило: нет <link> элемент может служить дочерним узлом в нескольких <joint> элемент. По-другому, нет <link> элемент может иметь несколько родительских элементов в графике связности модели. Только корневая ссылка, которая находится в источнике связности, может иметь ряд родительских узлов, отличных от единицы (нуль). В модели разрешено использование только одной корневой ссылки.
Кинематическая замкнутая цепь
<robot name = "linkage"> <joint name = "joint A ... > <parent link = "link A" /> <child link = "link B" /> </joint> <joint name = "joint B ... > <parent link = "link A" /> <child link = "link C" /> </joint> <joint name = "joint C ... > <parent link = "link C" /> <child link = "link D" /> </joint> <joint name = "joint D ... > <parent link = "link B" /> <child link = "link D" /> </joint> </robot>
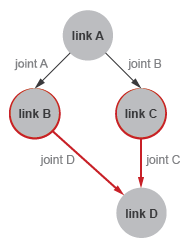
Код объявляет ссылку, link D, как дочерний узел в двух <joint> элементы, joint C и joint D. The link D элемент имеют два родительских элементов и образует кинематическую замкнутую цепь. Модель нарушает правила подключения URDF и является недопустимой. Рисунок показывает график связности модели.
График связности кинематической замкнутой цепи
Не все элементы и атрибуты, перечисленные в спецификации URDF, требуются. Некоторые, типа <inertial> под <link>, являются необязательными. Следующий код показывает различные элементы и атрибуты, которые вы можете использовать, с теми, которые необязательно окрашены в зеленый цвет.
Элементы и атрибуты, показанные как требуемые внутри необязательных элементов, доступны только при использовании необязательных элементов. Значения по умолчанию необязательных атрибутов показаны в круглых скобках и курсивом. Обратите внимание, что этот код включен только как ссылка и что он не представляет допустимую модель URDF. Эллипсы (... «») являются недопустимыми в моделях URDF и используются просто для разрыва длинных строк кода для удобства просмотра .
<robot name> <link name> <inertial> <origin xyz("0 0 0") rpy("0 0 0") /> <mass value /> <inertia ixx iyy izz ixy ixz iyz /> </inertial> <visual name> <origin xyz("0 0 0") rpy("0 0 0") /> <geometry> <box size /> <cylinder radius length /> <sphere radius /> <mesh filename scale("1") /> </geometry> <material name> <color rgba("0.5 0.5 0.5 1") /> <texture filename /> </material> </visual> <collision name> <origin xyz("0 0 0") rpy("0 0 0") /> <geometry> <box size /> <cylinder radius length /> <sphere radius /> <mesh filename scale("1") /> </geometry> </collision> </link> <joint name type> <origin xyz("0 0 0") rpy("0 0 0") /> <parent link /> <child link /> <axis xyz("1 0 0") /> <calibration rising /> <calibration falling /> <dynamics damping("0") friction("0") /> <limit† lower† upper† effort velocity /> <mimic joint multiplier("1") offset("0") /> <safety_controller soft_lower_limit("0") ... ... soft_upper_limit("0") k_position("0") k_velocity("0") /> </joint> </robot>
†Требуется для <joint> элементы type prismatic и revolute только.
В качестве примера создайте модель URDF двойного маятника. В выбранном текстовом редакторе создайте файл с кодом, показанным ниже, и сохраните файл как double_pendulum.urdf в удобной папке. Включите расширение файла в имя файла. Отдельный пример показывает, как импортировать эту модель в окружение Simscape Multibody (см. Импорт простой модели URDF).
<robot name = "linkage"> <!-- links section -->> <link name = "link A"> <inertial> <origin xyz = "0 0 0" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 0" /> <geometry> <box size = "0.5 0.5 0.1" /> </geometry> <material name = "gray A"> <color rgba = "0.1 0.1 0.1 1" /> </material> </visual> </link> <link name = "link B"> <inertial> <origin xyz = "0 0 -0.5" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 -0.5" /> <geometry> <cylinder radius = "0.05" length = "1" /> </geometry> <material name = "gray B"> <color rgba = "0.3 0.3 0.3 1" /> </material> </visual> </link> <link name = "link C"> <inertial> <origin xyz = "0 0 -0.5" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 -0.5" /> <geometry> <cylinder radius = "0.05" length = "1" /> </geometry> <material name = "gray C"> <color rgba = "0.5 0.5 0.5 1" /> </material> </visual> </link> <!-- joints section -->> <joint name = "joint A" type = "continuous"> <parent link = "link A" /> <child link = "link B" /> <origin xyz = "0 0 -0.05" /> <axis xyz = "0 1 0" /> </joint> <joint name = "joint B" type = "continuous"> <parent link = "link B" /> <child link = "link C" /> <origin xyz = "0 0 -1" /> <axis xyz = "0 1 0" /> <dynamics damping ="0.002" /> </joint> </robot>
Код задает модель мультитела с именем linkage. Модель содержит три ссылки, именованные link A, link B и link C, которые соединяются через два соединения, именованные joint A и joint B. The <parent> и <child> элементы соединений определяют, как ссылки соединяются друг с другом: link A соединяется с link B и link B соединяется с link C. link A не имеет родительской ссылки - то есть появляется в <joint> элементы только как дочерний элемент - и поэтому является корневой ссылкой.
The <inertial> элемент link A задает массу и моменты инерции (ixx, iyy, izz) ссылки. Продукты инерции (ixy, ixz, и iyz) не заданы и имеют значения , равные нулю URDF. The visual элемент link A определяет тип геометрии и цвет материала для использования в визуализации модели. Геометрия в этом случае является коробкой с шириной и толщиной 0.5 м и высота 0.1 м. The <origin> элементы ссылки <inertial> и <visual> задайте преобразования из системы координат ссылки в инерционную и визуальную системы координат. Подобные элементы применяются к link B и link C.
The type атрибут <joint> элементы определяют соединения как непрерывные - тип шарнирного соединения без пределов движения. The <origin> элемент задает местоположение соединения относительно опорной системы координат родительского элемента link. Для примера, <origin> элемент joint A смещает соединение 0.05 m вдоль -Z ось относительно источника link A опорная система координат. The axis элемент, вложенный в каждую joint элемент определяет ось вращения соединения как вектор Декартова [0, 1, 0], или +Y.
Рисунок показывает компоненты модели - ссылки и соединения - и различные системы координат, которые они содержат. R обозначает опорную систему координат ссылки, I - инерционную систему координат ссылки и V - визуальную систему координат ссылки. J обозначает опорную систему координат соединений - по определению удерживаемую совпадающую с опорной системой дочерней ссылки. Инерционная и визуальная системы координат смещены к центрам ссылок, а системы координат соединений - к их нижним ребрам.
Компоненты модели двухмаятника
![]()
Вы можете, но обычно не должны, вручную создать свои собственные файлы URDF. Для более сложных моделей может быть предпочтительнее получить файлы URDF из других источников. Производители и консультанты робототехники часто предоставляют модели URDF для своих робототехнических систем. CAD-приложения, такие как SolidWorks® и PTC® Creo™ поддерживают экспортеры URDF, которые преобразуют блоки CAD в модели URDF. Примите во внимание эти опции при работе со сложными моделями робототехники, которые может быть не просто создать вручную.
