Моделируйте гидравлическую турбину и пропорционально-интегрально-производную (ПИД) систему регулятора
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины / Синхронный Машинный Контроль
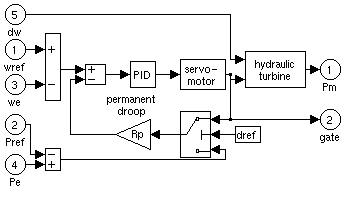
Блок Гидравлическая Турбина и Регулятор реализует нелинейную модель гидравлической турбины, систему ПИД регулятора и сервопривод [1].
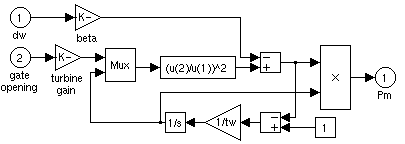
Гидравлическая турбина моделируется следующей нелинейной системой.
Сервопривод ворот моделируется системой второго порядка.
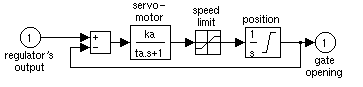
Коэффициент усиления Ka и константа времени Ta, в секундах (секундах), системы первого порядка, представляющей сервопривод. По умолчанию это [ 10/3 0.07 ].
Пределы gmin и gmax (pu), накладываемые на открытие ворот, и vgmin и vgmax (pu/s), накладываемые на скорость ворот. По умолчанию это [ 0.01 0.97518 -0.1 0.1 ].
Статический коэффициент усиления регулятора равен обратному значению постоянного падения Rp в цикле обратной связи. Регулятор ПИД имеет пропорциональную составляющую Kp, интегральную составляющую Ki и производный коэффициент Kd. Высокочастотный коэффициент усиления ПИД ограничивается lowpass первого порядка с постоянной временем Td (s). По умолчанию это [ 0.05 1.163 0.105 0 0.01 ].
Коэффициент демпфирования отклонения скорости β и время запуска воды Tw (s). По умолчанию это [ 0 2.67 ].
Задает вход цикла обратной связи: положение затвора (установлено на 1) или отклонение электрической степени (установлено на 0). По умолчанию это 0.
Начальная механическая степень Pm0 (pu) на валу машины. Это значение автоматически обновляется утилитой потока нагрузки блока Powergui. По умолчанию это 0.7516.
wrefЗадающая скорость, в пу.
PrefЭталонная механическая степень в пу. Этот вход может быть оставлен несвязанным, если вы хотите использовать положение затвора как вход в цикл обратной связи вместо отклонения степени.
weФактическая скорость машины, в пу.
Pe0Фактическая электрическая степень машины в пу. Этот вход может быть оставлен несвязанным, если вы хотите использовать положение затвора как вход в цикл обратной связи вместо отклонения степени.
dwОтклонение скорости, в пу.
PmМеханическая степень Pm для блока Synchronous Machine, в pu.
gateОткрытие ворот, в пу.
The power_turbine пример иллюстрирует использование Синхронной Машины, связанной с блоками Гидравлической Турбины и Регулятора (HTG) и Системы Возбуждения.
[1] Рабочая группа IEEE по моделям первичного двигателя и энергоснабжения для исследований динамической эффективности системы, «Модели гидравлического регулирования турбины и турбины для динамических исследований», IEEE® Сделки с степенями, том 7, № 1, февраль 1992, стр. 167-179.
Система возбуждения, паровая турбина и регулятор, Synchronous Machine SI Fundamental, Synchronous Machine pu Fundamental, Synchronous Machine pu Standard
