Моделируйте динамику трехфазной синхронной машины с неявнополюсным ротором или линейным полюсом с помощью основных параметров в единицах СИ
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Блок Synchronous Machine SI Fundamental моделирует синхронную машину в генераторе или моторном режиме, используя фундаментальные параметры в единицах СИ. Режим работы диктует знак механической степени (положительный для режима генератора или отрицательный для режима мотора). Электрическая часть машины представлена моделью пространства состояний шестого порядка, и механическая часть та же, что и в блоке Simplified Synchronous Machine.
Модель учитывает динамику обмоток статора, поля и демпфера. Эквивалентная схема модели представлена в исходной системе координат ротора (qd система координат). Обмотки статора соединены в соединениях с внутренней нейтральной точкой. Все параметры ротора и электрические величины просматриваются из статора и идентифицируются грунтованными переменными. Нижние индексы:
d,q - d - и q-составляющая величина
R,s - Количество ротора и статора
l,m - Индуктивность утечек и намагничивания
f,k - количество обмотки возбуждения и демпфера
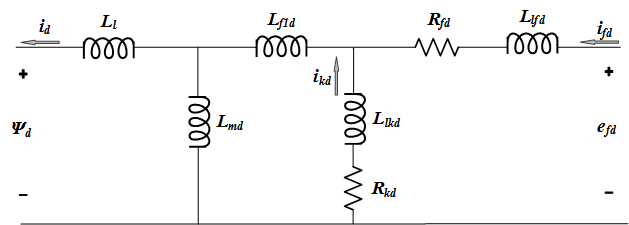
Электрическая модель машины показана на этих схемах.
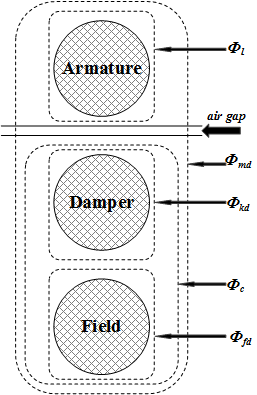
Обычная теория синхронного машинного моделирования для анализа устойчивости принимает, что взаимные индуктивности между якорем, демпфером и полем на обмотках с прямой осью идентичны. Обычно обмотки демпфера находятся вблизи воздушного зазора, и в результате цепи демпфера, связывающие поток, почти равны якорю, связывающему поток. Эта гипотеза дает приемлемые результаты для широкой области значений исследований стабильности, особенно на стороне сети. Однако, когда дело доходит до полевых текущих исследований, существует значительная ошибка. Эквивалентная схемная динамическая модель синхронной машины может включать дополнительную индуктивность, представляющую различие между демпфером возбуждения и взаимными индуктивностями якоря возбуждения на оси D [1]. Эта индуктивность обычно называется Canay inductance. Индуктивность каната соответствует потоку утечек, ΦC, на следующем рисунке и интерпретируется как корректирующий элемент в эквивалентной модели, которая может иметь отрицательное значение [2].
Стандарт IEEE 1110-2002 [3] представляет прямые и квадратичные оси динамической модели синхронной машины, как показано на схемах.
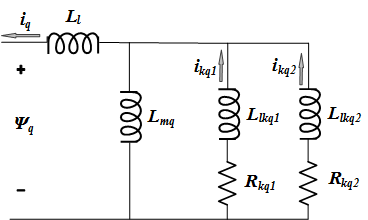
Релевантными уравнениями являются:
Блок Synchronous Machine SI Fundamental позволяет вам задать основные параметры синхронной машины. Вы входите в параметры обмотки возбуждения и демпфера (сопротивления, индуктивности утечек и взаимные индуктивности) в СИ ( Параметры RL обмотки возбуждения и обмотки демпфера являются не фактическими значениями RL поля машины, а значениями RL, относящимися к статору.
В этой таблице показаны базовые значения статора.
| Базовое напряжение статора = пиковое номинальное фазное напряжение (V) |
| Базовый ток статора (A) |
| Импеданс базового статора (В) |
| Базовая угловая частота (рад/с) |
| Индуктивность основного статора (H) |
где:
Pn - трехфазная номинальная степень (VA).
Vn - номинальное линейное напряжение (Vrms).
fn - номинальная частота (Гц).
ifn - номинальный ток возбуждения, генерирующий номинальное напряжение статора при отсутствии нагрузки (A).
Параметры статора, заданные в блоке:
| Rs | Сопротивление статора на фазу (В) |
| Ll | Индуктивность утечек статора (H) |
| Lmd | Прямая ось намагничивания индуктивности, наблюдаемая от статора (H) |
| Lmq | Квадратурная ось намагничивания индуктивности, наблюдаемой от статора (H) |
Этот рисунок показывает одну фазу обмотки статора, соединенной с обмоткой возбуждения.
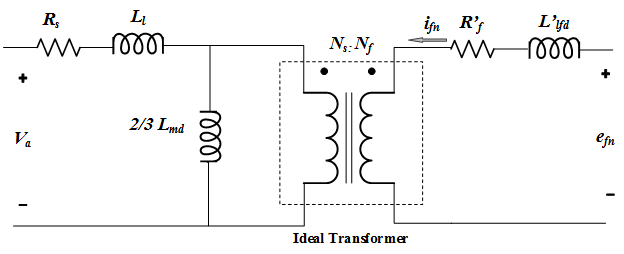
На схеме:
Ns и Nf являются эквивалентным количеством синусоидально распределенных витков обмотки статора и обмотки возбуждения, соответственно.
Rs и Ll - сопротивление статора и индуктивность утечек.
Rf ′ и Llfd ′ являются сопротивлением возбуждению и индуктивностью утечек.
Когда три обмотки статора возбуждаются трехфазным напряжением положительной последовательности и обмотка возбуждения открыта, индуктивность намагничивания статора Lmd. Однако, когда возбуждается только одна фаза и обмотка возбуждения открыта, индуктивность намагничивания составляет 2/3 Lmd, как показано на рисунке.
При отсутствии нагрузки, когда обмотка возбуждения вращается с номинальной скоростью и несет номинальное поле постоянного тока ifn, амплитуда переменного напряжения (пикового значения), индуцированного на одной фазе статора, Vsbase.
Максимальная взаимная индуктивность между одной обмоткой статора и обмоткой возбуждения получается, когда две обмотки выровнены и определяется:
из которого выводим коэффициент преобразования:
Коэффициент преобразования может быть также выражен как:
где Ifbase - основа поля. Таблица показывает, как вычислить базовые значения полей.
| Основа поля (A) |
| Основа поля (V) |
| Основа поля (В) |
| Индуктивность базового поля (H) |
Фактические параметры поля:
Rf ′ является сопротивлением обмотке возбуждения (И)
Llfd ′ является индуктивностью утечек возбуждения (H)
Можно задать параметры поля для сопротивления возбуждения и индуктивности утечек, относящихся к статору (Rf, Llfd).
Если номинальный ifn тока поля известен, коэффициент преобразования Ns/ Nf вычисляется с помощью того же уравнения, что и для отношения преобразования статор/поле.
По словам Краузе [4], полевое напряжение и ток упомянули статор (Vf, If) выведены из фактического <reservedrangesplaceholder1> , значения <reservedrangesplaceholder0> следующим образом:
Когда известно фактическое сопротивление возбуждению Rf ′ и индуктивности утечек Llfd ′ (если смотреть на ротор), значения, относящиеся к статору:
Когда номинальный ток поля не известен и известны значения сопротивления возбуждения и индуктивности утечек (Rf_pu, Llfd_pu), соответствующие значения СИ, относящиеся к статору, вычисляются следующим образом:
Те же преобразования используются для параметров RL обмоток демпфера.
Когда вы задаете номинальный ток поля, сигнал на Vf входном порте соответствует фактическому напряжению поля, как в реальной жизни. Ток поля, возвращенный выходом измерения, также соответствует фактическому If тока поля.
Номинальное напряжение возбуждения, генерирующее номинальное напряжение статора при отсутствии нагрузки, определяется:
Когда вы не задаете номинальный ток поля, сигнал на Vf входном порте соответствует фактическому напряжению поля, относящемуся к статору. В этом случае номинальное напряжение возбуждения, относящееся к статору, производящему номинальное напряжение статора без нагрузки, составляет:
Током поля, возвращаемым выходом измерения, является ток поля, относящийся к статору. Номинальный ток поля, относящийся к статору:
В дискретных системах, когда вы устанавливаете параметр Discrete solver model блока Synchronous Machine равным Trapezoidal non iterativeВозможно, вам придется подключить небольшую паразитную резистивную нагрузку к клеммам машины, чтобы избежать численных колебаний. Большие шаги расчета требуют больших нагрузок. Минимальная резистивная нагрузка пропорциональна шагу расчета. Как правило, помните, что с временным шагом 25 мкс на системе 60 Гц минимальная нагрузка составляет примерно 2,5% номинальной степени машины. Для примера синхронная машина 200 MVA в степень системе, дискретизированной с шагом расчета 50 мкс, требует приблизительно 5% сопротивления или 10 МВт. Если шаг расчета уменьшается до 20 мкс, должна быть достаточной резистивная нагрузка 4 МВт.
Однако, если вы задаете значение параметра Discrete solver model блока Synchronous Machine Trapezoidal iterative (alg. loop), можно использовать незначительную паразитную нагрузку (ниже 0,1% номинальной степени) при сохранении численной устойчивости. Эта итерационная модель создает алгебраический цикл и приводит к более медленной скорости симуляции.
В программном обеспечении анализа степеней уравнения синхронной машины обычно решаются с помощью метода преобразования прямой квадратуры и нуля. Параметры RL обмоток возбуждения и демпфера являются не фактическими значениями RL поля машины, а значениями RL, относящимися к статору. Параметры со стороны ротора передаются на сторону статора и нормализуются перед входом в окончательную обработку.
Preset model - Электрические и механические параметрыNo (по умолчанию) | 01: 50Hz 400V 8.1kVA 1500RPM | 02: 50Hz 400V 16kVA 1500RPM | ...Набор предопределенных электрических и механических параметров для различных номиналов синхронной машины степени (кВА), напряжения преобразования фазы в фазу (V), частоты (Гц) и номинальной скорости (об/мин).
Выберите одну из предустановленных моделей, чтобы загрузить соответствующие электрические и механические параметры. Варианты:
01: 50Hz 400V 8.1kVA 1500RPM
02: 50Hz 400V 16kVA 1500RPM
03: 50Hz 400V 31.3kVA 1500RPM
04: 50Hz 400V 42.5kVA 1500RPM
05: 50Hz 400V 60kVA 1500RPM
06: 50Hz 400V 85kVA 1500RPM
07: 50Hz 400V 250kVA 1500RPM
08: 50Hz 400V 325kVA 1500RPM
09: 50Hz 400V 670kVA 1500RPM
10: 50Hz 400V 910kVA 1500RPM
11: 50Hz 400V 1320kVA 1500RPM
12: 50Hz 400V 2000kVA 1500RPM
13: 60Hz 460V 10.2kVA 1800RPM
14: 60Hz 460V 20kVA 1800RPM
15: 60Hz 460V 37.5kVA 1800RPM
16: 60Hz 460V 52.5kVA 1800RPM
17: 60Hz 460V 72.5kVA 1800RPM
18: 60Hz 460V 100kVA 1800RPM
19: 60Hz 460V 300kVA 1800RPM
20: 60Hz 460V 406kVA 1800RPM
21: 60Hz 460V 800kVA 1800RPM
22: 60Hz 460V 1075kVA 1800RPM
23: 60Hz 460V 1588kVA 1800RPM
24: 60Hz 460V 2500kVA 1800RPM
Выберите No (по умолчанию) если вы не хотите использовать предустановленную модель или хотите изменить некоторые параметры предустановленной модели, как описано ниже.
При выборе предустановленной модели электрические и механические параметры на вкладке Parameters затемняются). Чтобы начать с предустановленной модели и затем изменить параметры машины:
Выберите предустановленную модель, для которой необходимо инициализировать параметры.
Измените параметр Preset model на No. Это действие не изменяет параметры машины, но разрывает связь с предустановленной моделью.
Измените параметры машины так, как вы хотите.
Mechanical input - Механический входMechanical power Pm (по умолчанию) | Speed w | Mechanical rotational portПредставляет ли механическая степень, приложенная к валу, или скорость ротора как Simulink® вход блока или для представления вала машины с Simscape™ вращательным механическим портом.
Выберите Mechanical power Pm чтобы задать механический вход степени, в Вт, и показать порт Pm. Машинная скорость определена машинной инерцией J и различием между механическим крутящим моментом Tm, который следует из поданного механического питания Pm, и внутренний электромагнитный крутящий момент Te. Когда скорость положительная, положительный механический сигнал степени указывает на режим генератора, а отрицательный сигнал указывает на режим мотора.
Выберите Speed w чтобы задать скорость входа в rad/s и открыть w порт. Скорость машины накладывается, и механическая часть модели (J инерции машины) игнорируется. Использование скорости в качестве механического входа позволяет вам смоделировать механическую связь между двумя машинами.
Следующий рисунок показывает, как смоделировать жесткое соединение вала в наборе генераторов, где обе машины являются синхронными машинами.
Выход скорости машины 1 (двигатель) соединяется со входом скорости машины 2 (генератор). На этом рисунке крутящий момент трения проигнорирован в машине 2. Поэтому выходной Te электромагнитного крутящего момента соответствует Tm механического крутящего момента, приложенному к валу машины 1. Соответствующая механическая входная степень машины 1 вычисляется как Pm = Tm * w.Коэффициент Kw учитывает модули скорости обеих машин (рад/с) и отношение коробки передач w2/w1. Коэффициент KT учитывает модули крутящего момента обеих машин (N.m) и номинальные значения машины. Кроме того, поскольку J2 инерции проигнорирована в машине 2, J2 относится к скорости машины 1 и должно быть добавлено к J1 инерции машины 1.
Выберите Mechanical rotational port S, чтобы открыть механический вращательный порт Simscape, который позволяет вам соединить вал машины с другим валом машины или с другими блоками Simscape, которые имеют механические вращательные порты.
Рисунок показывает, как соединить блок Ideal Torque Source из библиотеки Simscape с портом вала машины, чтобы представлять машину в режиме двигателя или режиме генератора, когда скорость ротора положительная.
Rotor type - Тип ротораSalient-pole (по умолчанию) | RoundЗадайте тип ротора следующим образом Salient-pole или Round (цилиндрический). Настройка влияет на количество схем ротора в q-оси (обмотки демпфера).
Use signal names to identify bus labels - Как идентифицировать метки шиныoff (по умолчанию) | onКогда этот флажок установлен, выходы измерения используют имена сигналов для идентификации меток шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигналов шины имели только алфавитно-цифровые символы.
Когда этот флажок снят, выходы измерения используют определение сигнала для идентификации меток шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Nominal power, voltage, frequency, field current [ Pn(VA) Vn(Vrms) fn(Hz) ifn(A) ] - Номинальная степень, напряжение, частота и ток возбуждения[ 187E6 13800 60 1087 ] (по умолчанию) | четырехэлементный векторОбщая трехфазная видимая Pn степени (VA), линейное напряжение RMS Vn (V), частотная fn (Гц) и ток возбуждения ifn (A).
Номинальный ток поля является током, который генерирует номинальное напряжение контакта при условиях отсутствия нагрузки. Эта модель была разработана со всеми величинами, просматриваемыми из статора, как объяснено в Krause [4]. Номинальный ток возбуждения позволяет вычислить коэффициент преобразования машины, что позволяет прикладывать напряжение возбуждения, рассматриваемое с ротора, как в реальной жизни. Это также позволяет смотреть ток поля, который является переменной в выходном векторе модели, от ротора.
Если значение номинального тока поля не известно, необходимо ввести 0 или оставьте его пустым. Поскольку коэффициент преобразования не может быть определен в этом случае, вы должны применить напряжение поля, как видно из статора. Ток поля в векторе выхода также рассматривается от статора.
Stator [ Rs(ohm) Ll,Lmd,Lmq(H) (Lc(H)) ] - Сопротивление статора и индуктивность[ 2.9069E-03 3.0892E-04 3.2164E-03 9.7153E-04 ] (по умолчанию) | четырехэлементный векторСопротивление Rs (O), индуктивность утечек Lls (H), d ось и q ось, намагниченная индуктивность Lmd (H) и Lmq (H), и индуктивность Канея. Если значение индуктивности Канея в неизвестном, необходимо ввести 0 или оставьте его пустым.
Field [ Rf'(ohm) Llfd'(H) ] - Сопротивление обмотке возбуждения и индуктивность утечек[ 5.9013E-04 3.0712E-04 ] (по умолчанию) | двухэлементный векторСопротивление обмотки Rf и Llfd индуктивности утечек (H), оба относятся к статору.
Dampers [ Rkd',Llkd' Rkq1',Llkq1' ] (R=ohm,L=H) - Сопротивление и индуктивность утечек[ 1.1900E-02 4.9076E-04 2.0081E-02 1.0365E-03 ] (по умолчанию) | четырехэлементный векторсопротивление d-оси Rkd (Ω) и индуктивность утечки Llkd (H) и сопротивление q-оси Rkq1 (Ω) и индуктивность утечки Llkq1 (H). Все эти значения относятся к статору.
Чтобы включить этот параметр, установите Rotor type равным Salient-pole.
Dampers [ Rkd',Llkd' Rkq1',Llkq1' Rkq2',Llkq2' ] (R=ohm,L=H) - Сопротивление и индуктивность утечек[ 0.0664, 1.387e-3, 0.0292, 6.896e-4, 7.907e-3, 2.477e-3] (по умолчанию) | вектор с шестью элементамисопротивление d-оси Rkd (Ω) и индуктивность утечки Llkd (H), сопротивление q-оси Rkq1 (Ω) и индуктивность утечки Llkq1 (H) и сопротивление q-оси Rkq2 (Ω) и индуктивность утечки Llkq2 (H). Все эти значения относятся к статору.
Чтобы включить этот параметр, установите Rotor type равным Round.
Inertia, friction factor, pole pairs [ J(kg.m^2) F(N.m.s) p() ] - Инерция, коэффициент трения и пары полюсов[ 3.895e6 0 20 ] (по умолчанию) | трехэлементный векторКоэффициент инерции J (kg.m2), коэффициент трения F (N.m.s) и количество пар полюсов p. Крутящий момент трения Tf пропорциональен скорости вращения ротора ω (Tf = F. Tf выражается в N.m, F в N.m.s и ω в рад/с.
Чтобы включить этот параметр, установите Mechanical input равным Mechanical power Pm или Mechanical rotational port.
Pole pairs - Количество пар полюсов20 (по умолчанию) | положительное целое числоКоличество пар полюсов синхронной машины.
Чтобы включить этот параметр, установите Mechanical input равным Speed w.
Initial conditions [ dw(%) th(deg) ia,ib,ic(A) pha,phb,phc(deg) Vf(V) ] - Начальные условия[ 0 0 0 0 0 0 0 0 70.3192 ] (по умолчанию) | вектор с девятью элементамиНачальное отклонение скорости Δω (процент номинальной скорости), электрический угол Θe ротора (степени), величины тока в линии ia, ib, ic (A) и углы фазы < reservedrangesplaceholder4 > , < reservedrangesplaceholder3 > , < reservedrangesplaceholder2 > (степениder2 > (степени) и начальное напряжение возбуждения Vf (V). Можно вычислить эти значения автоматически с помощью инструмента Load Flow или инструмента Machine Initialization блока powergui.
Можно задать начальное напряжение поля одним из двух способов. Если вы знаете номинальный ток поля (первая линия, последний параметр), введите начальное напряжение поля в вольтах постоянного тока, относящихся к ротору. В противном случае введите нуль в качестве номинального тока поля и задайте начальное напряжение поля в вольтах постоянного тока, относящихся к статору. Можно определить номинальное напряжение поля, просматриваемое из статора, установив флажок Display nominal field current and voltage producing 1 pu stator voltage на вкладке Advanced.
Simulate saturation - Симулируйте магнитное насыщениеoff (по умолчанию) | onМоделируется ли магнитное насыщение ротора и статорного железа.
Установите этот флажок, чтобы предоставить матрицу параметров для симуляции насыщения.
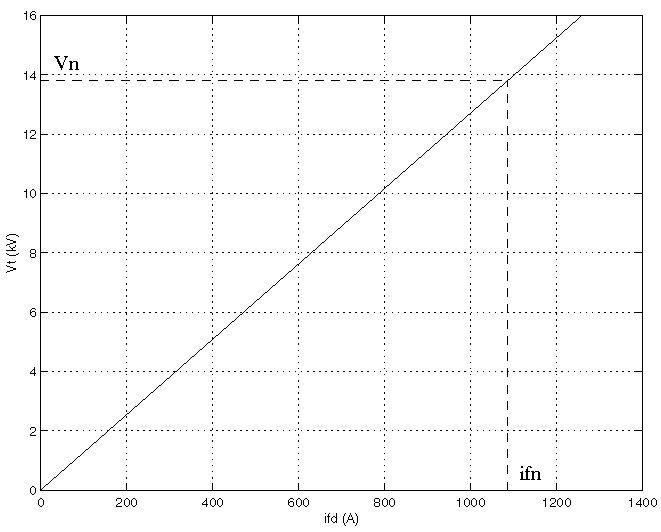
Снимите этот флажок, чтобы не моделировать насыщение в симуляции. В этом случае отношение между ifd и Vt линейное (без насыщения).
[ ifd(A) ; Vt(VLL rms)] - Параметры кривой насыщения без нагрузки[695.64,774.7,917.5,1001.6,1082.2,1175.9,1293.6,1430.2,1583.7;9660,10623,12243,13063,13757,14437,15180,15890,16567] (по умолчанию) | векторПараметры кривой насыщения без нагрузки. Магнитное насыщение статора и роторного железа моделируется кусочно-линейной зависимостью, задающей точки на кривой насыщения без нагрузки. Первая строка этой матрицы содержит значения токов поля. Вторая строка содержит значения соответствующих контактных напряжений. Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где начинается эффект насыщения. Для насыщения номинальный ток возбуждения и номинальное линейное напряжение RMS являются базовыми значениями для тока возбуждения и контактного напряжения, соответственно.
Щелкните Plot, чтобы просмотреть кривую насыщения без нагрузки.
Чтобы включить этот параметр, выберите Simulate saturation.
Чтобы включить вкладку Advanced, в блоке powergui задайте Simulation type Discrete и очистить Automatically handle discrete solver.
Display nominal field current and voltage producing 1 pu stator voltage - Определить номинальный ток и напряжение возбужденияoff (по умолчанию) | onВыберите, чтобы определить номинальный ток поля и напряжение, просматриваемое от статора.
Для примера без насыщения рисунок показывает типовую кривую. ifn 1087 A, и Vn 13800 V RMS линия - линия, которая также 11268 V пиковая линия - нейтраль.
Насыщение моделируется как кусочно-линейная кривая насыщения с помощью двух интерполяционных таблиц, реализующих изменения Lmd и Lmq намагничивания индуктивности.
Следующий рисунок иллюстрирует хорошую подгонку графически (бриллианты являются фактическими точками, введенными в диалоговом окне).
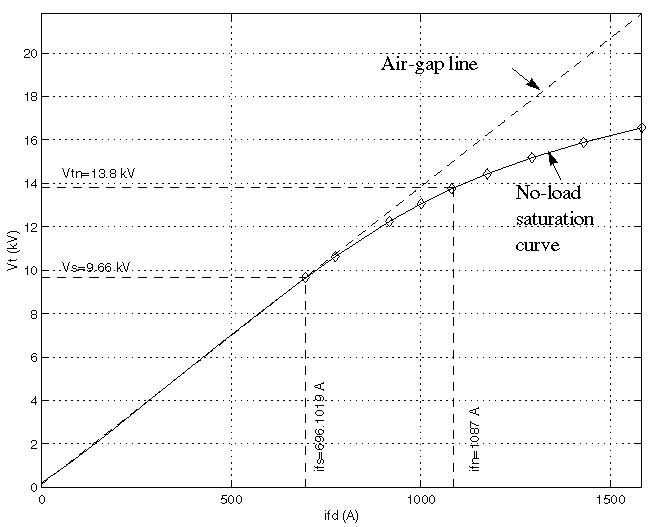
В этом случае используются следующие значения:
ifn | 1087 A |
ifd | [695,64, 774,7, 917,5, 1001,6, 1082,2, 1175,9, 1293,6, 1430,2, 1583,7] А |
Vt | [9660, 10623, 12243, 13063, 13757, 14437, 15180, 15890, 16567] V |
Sample time (-1 for inherited) - Шаг расчета для блока-1 (по умолчанию) | скаляромШаг расчета, используемого блоком. Чтобы наследовать шаг расчета, заданную в блоке powergui, установите этот параметр равным −1.
Discrete solver model - Метод интегрированияTrapezoidal non iterative (по умолчанию) | Trapezoidal iterative (alg. loop) | Trapezoidal robust | Backward Euler robustМетод интегрирования, используемый блоком, когда параметр Solver type блока powergui равен Discrete.
Значение Discrete solver model автоматически устанавливается на Trapezoidal robust при выборе параметра Automatically handle Discrete solver and Advanced tab solver settings of blocks блока powergui.
The Trapezoidal non iterative и Trapezoidal iterative (alg. loop) методы больше не рекомендуются для дискретизации блока Synchronous Machine SI Fundamental. Trapezoidal non iterative требует, чтобы вы добавили незначительные нагрузки шунта на терминалах машины, чтобы гарантировать стабильность симуляции, и Trapezoidal iterative (alg. loop) может не сходиться и привести к остановке симуляции, когда количество машин увеличивается в модели.
The Trapezoidal robust и Backward Euler robust методы позволяют устранить необходимость использования паразитарных нагрузок и моделировать машину без нагрузок. Для устранения топологических ошибок машин, подключенных к индуктивной схеме (для примера, выключатель, соединенный последовательно с машиной); машина моделирует незначительную внутреннюю нагрузку в 0,01% от номинальной степени.
The Trapezoidal robust метод немного точнее, чем Backward Euler robust метод, особенно когда модель моделируется при больших шагах расчета. The Trapezoidal robust способ может привести к легким демпфированным численным колебаниям на напряжении машины при условиях отсутствия нагрузки, в то время как Backward Euler robust способ предотвращает колебания и поддерживает хорошую точность.
Для получения дополнительной информации о том, какой метод использовать в вашем приложении, смотрите Симуляция дискретизированных электрических систем.
Параметры потока нагрузки используются, чтобы задать параметры блоков для использования с инструментом Load Flow блока powergui. Эти параметры потока нагрузки используются только для инициализации модели. Они не имеют никакого влияния ни на модель блока, ни на эффективность симуляции.
Generator type - Тип генератора машиныPV (по умолчанию) | swing | PQТип генератора машины. Выбор:
swing - реализует генератор, управляющий величиной и углом фазы своего терминального напряжения. Ссылки величины напряжения и угол заданы параметрами Swing bus or PV bus voltage и Swing bus voltage angle блока Load Flow Bus, соединенного с клеммами машины.
PV - реализует генератор, управляющий его выходной активной P степени и V величины напряжения. P задается параметром Active power generation P (W) блока. V задается параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с клеммами машины. Можно управлять минимальной и максимальной реактивной степенью, генерируемой блоком, используя параметры Minimum reactive power Qmin (var) и Maximum reactive power Qmax (var).
PQ - Реализует генератор, управляющий его выходной активной P степени и реактивной Q степени. P и Q заданы параметрами Active power generation P (W) и Reactive power generation Q (var) блока, соответственно.
Active power generation P (W) - Активная степень, генерируемая машиной0 (по умолчанию) | скаляромАктивная степень, которую вы хотите сгенерировать машиной, в ваттах. Когда машина работает в моторном режиме, вы задаете отрицательное значение.
Чтобы включить этот параметр, установите Generator type равным PV или PQ.
Reactive power generation Q (var) - Реактивная степень, генерируемая машиной0 (по умолчанию) | скаляромРеактивная степень, которую вы хотите сгенерировать машиной, в изменениях. Отрицательное значение указывает, что реактивная степень поглощается машиной.
Чтобы включить этот параметр, установите Generator type равным PQ.
Minimum reactive power Qmin (var) - Минимальная реактивная степень, генерируемая машиной-inf (по умолчанию) | скаляромМинимальная реактивная степень, которое может быть сгенерировано машиной при сохранении напряжения на клемме на ссылку значении. Это опорное напряжение задается параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с клеммами машины. Значение по умолчанию -inf, что означает отсутствие нижнего предела на выходной реактивной степени.
Чтобы включить этот параметр, установите Generator type равным PV.
Maximum reactive power Qmax (var) - Максимальная реактивная степень, генерируемая машинойinf (по умолчанию) | скаляромМаксимальная реактивная степень, которое может быть сгенерировано машиной при сохранении напряжения на ссылку значении. Это опорное напряжение задается параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с клеммами машины. Значение по умолчанию inf, что означает отсутствие верхнего предела на выходной реактивной степени.
Чтобы включить этот параметр, установите Generator type равным PV.
The power_SM_Fundamental пример использует блок Synchronous Machine SI Fundamental и блок Synchronous Machine pu Fundamental, чтобы смоделировать синхронный генератор 555 MVA, 24 кВ, 60 Гц, 3600 об/мин. Это показывает, как задать параметры СИ и pu и объясняет, как вычислить параметры обмотки ротора возбуждения и демпфера, которые относятся к статору. В сложение к обмотке возбуждения круглый ротор этой машины имеет три обмотки демпфера: один демпфер в прямой оси и два демпфера в квадратурной оси.
Три схемы моделируют одну и ту же синхронную машину:
Схема 1: Основные параметры заданы в СИ. Задан номинальный ток поля (ifn = 1300 A).
Схема 2: Основные параметры заданы в СИ. Номинальный ток поля не задан (ifn = 0).
Схема 3: Основные параметры заданы в pu.
Параметры машины взяты из примера в Кундуре [5].
Посмотрите на Model Properties/PreLoad Fcn раздел коллбэка модели, чтобы увидеть спецификации машины и расчет основ статора и поля, параметры ротора RL, относящиеся к статору, коэффициент преобразования и номинальное напряжение поля и ток.
Первоначально машины работают в установившемся состоянии при практически отсутствии нагрузки (нагрузка = 0,1% номинальной степени) с постоянным напряжением возбуждения и механической степенью. Отказ шестикратного цикла от фазы к фазе прикладывается при t = 0,1 с. Блок Scope показывает сравнение между линейным напряжением AB, током статора фазы A и током возбуждения трех машин.
Чтобы симулировать дискретную модель, в блоке powergui задайте Simulation type Discrete. Модель дискретизирована со шаг расчета Ts = 50 мкс. Чтобы получить стабильную модель с такой малой нагрузкой (0,1% номинальной степени), в Advanced вкладке каждого блока Synchronous Machine установите Discrete solver model Trapezoidal iterative (alg. loop).
The power_syncmachine пример использует блок Synchronous Machine в моторном режиме. Моделируемая система состоит из синхронного двигателя производственного класса 150 л.с. (112 кВА), 762 В, подключенного к сети с уровнем короткой схемы 10 МВА. Машина инициализируется для выходной электрической степени − 50 кВт (отрицательное значение для моторного режима), соответствующей механической степени − 48,9 кВт. Соответствующие значения механической степени и напряжения возбуждения заданы блоком Pm Step и блоком Vf Constant. Блок Pm Step применяет внезапное увеличение механической степени с − 48,9 кВт до − 60 кВт в момент t = 0,1 с.
Запустите симуляцию.
После увеличения нагрузки с 48,9 кВт до 60 кВт при t = 0,1 с скорость машины колеблются перед стабилизацией до 1800 об/мин. Угол нагрузки (угол между контактным напряжением и внутренним напряжением) увеличивается с − 21 степени до − 53 степени.
[1] Канай, И.М. «Причины расхождений в вычислении количества роторов и точных эквивалентных схем синхронной машины». IEEE®Транзакции на энергетических аппаратах и системах. PAS-88, № 7 (1969): 1114-1120.
[2] Moeini, A., et al. «Синхронная модель устойчивости машины, обновление до IEEE Std 1110-2002 Data Translation Technique». Сеансы панели стандартов IEEE. 2018.
[3] Руководство IEEE по методикам моделирования синхронных генераторов и применениям в анализе устойчивости системы степеней. IEEE Std 1110-2002 (Редакция IEEE Std 1110-1991 [2003]): 1-72.
[4] Krause, P.C. Анализ электрической техники. Раздел 12.5. Нью-Йорк: McGraw-Hill, 1986.
[5] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, McGraw-Hill, 1994.
Excitation System | Hydraulic Turbine and Governor | powergui | Simplified Synchronous Machine | Steam Turbine and Governor | Synchronous Machine pu Fundamental | Synchronous Machine pu Standard
