Трехфазная синхронная машина с постоянными магнитами с синусоидальной или трапециевидной противоэлектродвижущей силой или пятифазная синхронная машина с постоянными магнитами с синусоидальной противоэлектродвижущей силой
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Блок Permanent Magnet Synchronous Machine реализует трехфазную или пятифазную синхронную машину с постоянными магнитами. Обмотки статора соединены в соединениях с внутренней нейтральной точкой.
Трехфазная машина может иметь синусоидальную или трапецию коэффициента противо-ЭДС. Ротор может быть круглым или вертикальным полюсом для синусоидальной машины. Ротор округлый, когда машина трапеций. Предустановленные модели доступны для синусоидального коэффициента противо-ЭДС машины.
Пятифазная машина имеет синусоидальный коэффициент противо-ЭДС сигнал и ротор круглого сечения.
Блок Permanent Magnet Synchronous Machine работает или в генераторе, или в моторном режиме. Режим работы диктует знак механического крутящего момента (положительный для моторного режима, отрицательный для генераторного режима). Каждая электрическая и механическая части машины представлены моделью пространства состояний второго порядка.
Синусоидальная модель принимает, что поток, установленный постоянными магнитами в статоре, синусоидален, что подразумевает, что электродвижущие силы синусоидальны.
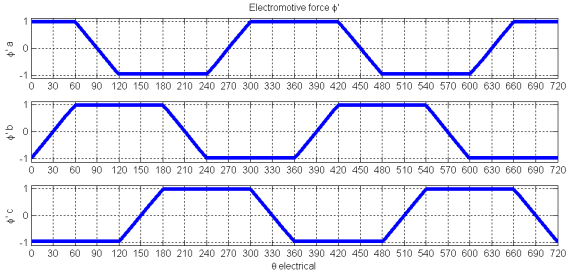
Трапеций модель принимает, что распределение обмотки и поток, установленные постоянными магнитами, производят три трапеций назад ЭДС формы.
Эти уравнения выражены в исходной системе координат ротора (qd кадр). Все величины в исходной системе координат ротора относятся к статору.
Lq, Ld | q -ось и d -индуктивность оси |
R | Сопротивление обмоток статора |
iq, id | q -ось и d -ось токи |
vq, vd | q -ось и d -ось напряжения |
ωm | Скорость вращения ротора |
λ | Амплитуда потока, вызванного постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Те | Электромагнитный крутящий момент |
Lq и Ld индуктивности представляют отношение между индуктивностью фазы и положением ротора из-за салиентности ротора. Для примера индуктивность, измеренная между фазой A и B (когда фаза C оставлена открытой), задается:
где И e представляет электрический угол.
Следующий рисунок показывает изменение индуктивности фазы к фазе в функции электрического угла ротора.
Для круглого ротора нет изменения индуктивности фазы:
Для явного ротора круглого сечения индуктивность dq определяется:
Эти уравнения выражены в исходной системе координат ротора с помощью расширенного преобразования Park (системы координат q1d1 и q2d2). Все величины в исходной системе координат ротора относятся к статору.
L | Индуктивность якоря |
R | Сопротивление обмоток статора |
iq1, id1 | q1 -ось и d1 -ось токи |
vq1, vd1 | q1 -ось и d1 -ось напряжения |
iq2, id2 | q2 -ось и d2 -ось токи |
vq2, vd2 | q2 -ось и d2 -ось напряжения |
ωm | Скорость вращения ротора |
λ | Амплитуда потока, вызванного постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Те | Электромагнитный крутящий момент |
Эти уравнения выражены в исходной системе координат фазы (система координат abc). Обратите внимание, что Ls индуктивности фазы принята постоянной и не изменяется в зависимости от положения ротора.
Ls | Индуктивность обмоток статора |
R | Сопротивление обмоток статора |
ia, ib, ic | a, b и c токов фазы |
Φa',', В' | a, b и c электродвижущие силы фазы в относительных значениях к амплитуде потока |
vab, vbc | ab и bc фазы в фазовые напряжения |
ωm | Скорость вращения ротора |
λ | Амплитуда потока, вызванного постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Те | Электромагнитный крутящий момент |
Электродвижущая сила' представлен:
J | Комбинированная инерция ротора и нагрузки |
F | Комбинированное вязкое трение ротора и нагрузки |
θ | Угловое положение ротора |
Tm | Механический крутящий момент на валу |
Tf | Статический крутящий момент трения вала |
ωm | Скорость вращения ротора (механическая скорость) |
Когда вы используете Permanent Magnet Synchronous Machine блоки в дискретных системах, вам, возможно, придется использовать небольшую паразитическую резистивную нагрузку, соединенную на клеммах машины, чтобы избежать численных колебаний. Большие шаги расчета требуют больших нагрузок. Минимальная резистивная нагрузка пропорциональна шагу расчета. Помните, что с временным шагом 25 мкс в системе 60 Гц минимальная нагрузка составляет приблизительно 2,5% от номинальной степени машины. Для примера синхронная машина с постоянными магнитами 200 MVA в степень системе, дискретизированной с шагом расчета 50 мкс, требует приблизительно 5% сопротивления, или 10 МВт. Если шаг расчета уменьшается до 20 мкс, достаточна резистивная нагрузка 4 МВт.
Блок Permanent Magnet Synchronous Machine принимает линейную магнитную схему без насыщения статора и ротора. Это предположение может быть сделано из-за большого воздушного зазора, обычно встречающегося в синхронных машинах с постоянными магнитами.
m - Внутренние измерения машиныВектор, содержащий сигналы измерения. Блок возвращает вектор с 13 элементами, когда Number of phases установлено на 3и вектор с 16 элементами, когда Number of phases установлено на 5. Доступные сигналы зависят от выбранной модели. Можно демультиплексировать эти сигналы с помощью блока Bus Selector, предоставленного в Simulink® библиотека. Сигналы включают:
Имя | Определение | Модули | Модель |
|---|---|---|---|
МСФО | Ток статора is_a | A | Все |
ibs | Ток статора is_b | A | Все |
ics | Ток статора is_c | A | Все |
ids | Ток статора is_d | A | Пятифазный синусоидальный |
ies | Ток статора is_e | A | Пятифазный синусоидальный |
IQ | Ток статора is_q | A | Трехфазный синусоидальный |
ids | Ток статора is_d | A | Трехфазный синусоидальный |
iqs1 | Ток статора is_q1 | A | Пятифазный синусоидальный |
ids1 | Ток статора is_d1 | A | Пятифазный синусоидальный |
iqs2 | Ток статора is_q2 | A | Пятифазный синусоидальный |
ids2 | Ток статора is_d2 | A | Пятифазный синусоидальный |
vqs | Напряжение статора Vs_q | V | Трехфазный синусоидальный |
vds | Напряжение статора Vs_d | V | Трехфазный синусоидальный |
vqs1 | Напряжение статора Vs_q1 | V | Пятифазный синусоидальный |
vds1 | Напряжение статора Vs_d1 | V | Пятифазный синусоидальный |
vqs2 | Напряжение статора Vs_q2 | V | Пятифазный синусоидальный |
vds2 | Напряжение статора Vs_d2 | V | Пятифазный синусоидальный |
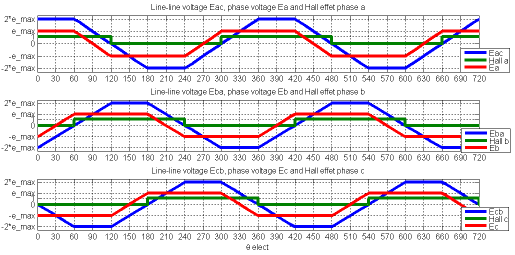
EA | Фаза коэффициента противо-ЭДС e_a | V | Трехфазный трапеций |
eb | Фаза коэффициента противо-ЭДС e_b | V | Трехфазный трапеций |
ЕС | Фаза коэффициента противо-ЭДС e_c | V | Трехфазный трапеций |
ха | Сигнал эффекта Холла h_a* | логический (0 или 1) | Трехфазный, синусоидальный и трапеций |
hb | Сигнал эффекта Холла h_b* | логический (0 или 1) | Трехфазный, синусоидальный и трапеций |
hc | Сигнал эффекта Холла h_c* | логический (0 или 1) | Трехфазный, синусоидальный и трапеций |
w | Скорость ротора wm | рад/с | Все |
theta | Угол тетама ротора | рад | Все |
Те | Электромагнитный крутящий момент Te | N.m | Все |
Сигнал эффекта Холла обеспечивает логическую индикацию позиционирования коэффициента противо-ЭДС. Этот сигнал очень полезен для непосредственного управления ключами степени. Происходит изменение состояния при каждом пересечении нуля напряжения фазы с фазой. Эти сигналы должны быть декодированы перед применением к коммутаторам.
Number of phases - Количество фаз для модели машины3 (по умолчанию) | 5Выберите между моделью трехфазной машины или моделью пятифазной машины.
Back EMF waveform - Электродвижущая силаSinusoidal (по умолчанию) | TrapezoidalВыберите между Sinusoidal и Trapezoidal электродвижущая сила.
Чтобы включить этот параметр, установите Number of phases равным 3.
Rotor type - Тип ротораRound (по умолчанию) | Salient-poleВыберите между Salient-pole и Round роторы.
Чтобы включить этот параметр, установите Number of phases равным 3 и установите Back EMF waveform равным Sinusoidal.
Mechanical input - Тип входаTorque Tm (по умолчанию) | Speed w | Mechanical rotational portВыберите, обеспечивается ли вход крутящим моментом, приложенным к валу, скорости ротора или валу машины, представленным Simscape™ вращающимся механическим портом.
Выберите Torque Tm чтобы задать вход крутящего момента в N.m и выставить Tm порт. Скорость машины определяется машиной Inertia J и различием между приложенным механическим крутящим моментом Tm и внутренним электромагнитным крутящим моментом Te. Знак для механического крутящего момента, когда скорость положительная. Сигнал положительного крутящего момента указывает на режим двигателя, а сигнал отрицательного - на режим генератора.
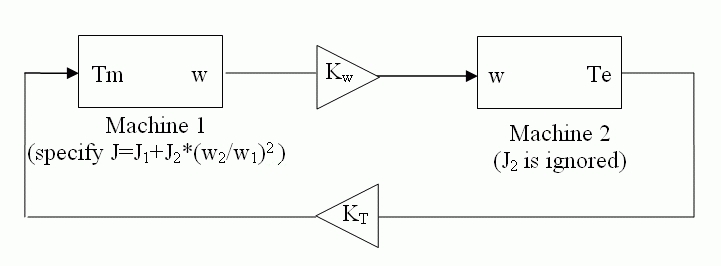
Выберите Speed w чтобы задать вход в рад/с и показать w порт. Скорость машины налагается, и механическая часть модели (Inertia J) игнорируется. Использование скорости в качестве механического входа позволяет моделировать механическую связь между двумя машинами.
Следующий рисунок показывает, как смоделировать жесткое соединение вала в наборе генераторов, когда крутящий момент трения проигнорирован в машине 2. Выход скорости машины 1 (двигатель) соединяется со входом скорости машины 2 (генератор), в то время как выход электромагнитного крутящего момента машины 2, Te, прикладывается к входу механического крутящего момента машины 1, Tm. Коэффициент Kw учитывает модули скорости обеих машин (pu или рад/с) и отношение коробок передач w2/w1. Коэффициент KT учитывает модули крутящего момента как машины (pu или N.m), так и номинальные значения машины. Кроме того, поскольку J2 инерции проигнорирована в машине 2, J2 добавляется к инерции машины 1, J1.
Выберите Mechanical rotational port чтобы открыть механический вращательный порт Simscape, который позволяет вам соединить вал машины с другими блоками Simscape с механическими вращательными портами.
Следующий рисунок показывает, как соединить блок Ideal Torque Source из библиотеки Simscape с валом машины, чтобы представлять машину в режиме двигателя или в режиме генератора.
Preset model - Электрические и механические параметры No (по умолчанию) | 01: 0.8 Nm 300 Vdc 3000 RPM - 0.8 Nm | 02: 1.7 Nm 300 Vdc 3750 RPM - 1.7 Nm | ...Предопределенные электрические и механические параметры для различных номиналов синхронного двигателя с постоянными магнитами крутящего момента (N.m), напряжения шины постоянного тока (V), номинальной скорости (об/мин) и непрерывного крутящего момента штока (N.m).
Выберите одну из предустановленных моделей, чтобы загрузить соответствующие электрические и механические параметры в записи диалогового окна. Выберите No (по умолчанию), если вы не хотите использовать предустановленную модель, или если вы хотите изменить некоторые параметры предустановленной модели.
Доступные предустановленные модели:
No
01: 0.8 Nm 300 Vdc 3000 RPM - 0.8 Nm
02: 1.7 Nm 300 Vdc 3750 RPM - 1.7 Nm
03: 2.8 Nm 300 Vdc 4250 RPM - 3.2 Nm
04: 6 Nm 300 Vdc 4500 RPM - 6 Nm
05: 8 Nm 300 Vdc 2000 RPM - 10 Nm
06: 10 Nm 300 Vdc 2300 RPM - 14.2 Nm
07: 20 Nm 300 Vdc 2200 RPM - 33.9 Nm
08: 24 Nm 300 Vdc 2300 RPM - 41.4 Nm
09: 7.14 Nm 560 Vdc 5000 RPM - 8.3 Nm
10: 7.71 Nm 560 Vdc 5000 RPM - 10.2 Nm
11: 26.13 Nm 560 Vdc 3000 RPM - 27.3 Nm
12: 35.17 Nm 560 Vdc 3000 RPM - 37.4 Nm
13: 42.09 Nm 560 Vdc 3000 RPM - 45.6 Nm
14: 67.27 Nm 560 Vdc 1700 RPM - 70.2 Nm
15: 87.75 Nm 560 Vdc 3000 RPM - 97.96 Nm
16: 111 Nm 560 Vdc 3000 RPM - 126 Nm
При выборе предустановленной модели электрические и механические параметры на вкладке Parameters диалогового окна отключаются. Чтобы начать с заданной предустановленной модели и затем изменить параметры машины:
Выберите предустановленную модель, для которой необходимо инициализировать параметры.
Измените Preset model на No. Это не меняет параметры машины на вкладке Parameters.
Измените параметры машины, затем нажмите Apply.
Чтобы включить этот параметр, установите Number of phases равным 5, или установите Number of phases значение 3 и Back EMF waveform к Sinusoidal.
Use signal names to identify bus labels - Идентифицируйте с именами сигналов или определением сигналовoff (по умолчанию) | onКогда выбран, выходы измерения используют имена сигналов для идентификации меток шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигналов шины имели только алфавитно-цифровые символы.
При очистке выход измерения использует определение сигнала для идентификации меток шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Stator phase resistance Rs (Ohm) - Сопротивление фазы статора0.0485 (по умолчанию) | положительная скалярная величинаСопротивление фазы статора Rs (A).
Stator phase inductance Ls (H) - Индуктивность «статор-фаза-нейтраль»8.5e-3 (по умолчанию) | положительная скалярная величинаФаза статора - к нейтральной индуктивности Ls (H) трапеций модели.
Чтобы включить этот параметр, установите Number of phases равным 3 и Back EMF waveform к Trapezoidal.
Inductances [ Ld(H) Lq(H) ] - Фаза - нейтральная индуктивность[8.5e-3,8.5e-3] (по умолчанию) | двухэлементный векторИндуктивность «фаза-нейтраль» Ld (H) и Lq (H) в осях d -ось и q синусоидальной модели с ротором с выступающим полюсом .
Чтобы включить этот параметр, установите Number of phases равным 3, Back EMF waveform к Sinusoidal, и Rotor type к Salient-pole.
Armature inductance (H) - Индуктивность якоря синусоидальной модели 0.000395 (по умолчанию) | положительная скалярная величинаИндуктивность якоря синусоидальной модели с круглым ротором. Ld равно Lq.
Чтобы включить этот параметр, установите Number of phases равным 3, Back EMF waveform к Sinusoidal, и Rotor type к Round.
Specify - Машинная константаFlux linkage established by magnets (V.s) (по умолчанию) | Voltage Constant (V_peak L-L / krpm) | Torque Constant (N.m / A_peak)Машинная константа для параметризации блоков. Если вы выбираете константу, можно ввести ее значение в соответствующее поле параметра, в то время как два других параметра отключены.
Flux linkage - Постоянный поток0.1194 (по умолчанию) | положительная скалярная величинаПостоянные потоки на пары полюсов, вызванные в обмотках статора магнитами.
Чтобы включить этот параметр, установите Specify равным Flux linkage established by magnets (V.s).
Voltage constant - Пиковое линейное напряжение86.6271 (по умолчанию) | положительная скалярная величинаПиковое линейное напряжение на 1000 об/мин. Это напряжение представляет пиковое напряжение разомкнутой цепи, когда машина управляется как генератор со скоростью 1000 об/мин.
Чтобы включить этот параметр, установите Specify равным Voltage Constant (V_peak L-L / krpm).
Torque constant - Крутящий момент на ампер константы0.7164 (по умолчанию) | положительная скалярная величинаКрутящий момент на ампер константы. Эта константа принимает, что машина управляется инвертором, который обеспечивает идеальную синхронизацию между током и коэффициентом противо-ЭДС.
Синусоидальная модель: Принято течение синусоиды. Для получения дополнительной информации смотрите ac6_example_simplified.
Трапециевидная модель: Принят квадратный ток ware. Для получения дополнительной информации смотрите ac7_example_simplified.
Чтобы включить этот параметр, установите Specify равным Torque Constant (N.m / A_peak).
Back EMF flat area (degrees) - Ширина плоской верхней части120 (по умолчанию) | положительная скалярная величинаШирина плоской верхней части на половину периода электродвижущей силы' (степени) для трапеций машины.
Чтобы включить этот параметр, установите Number of phases равным 3 и Back EMF waveform к Trapezoidal.
Inertia, viscous damping, pole pairs, static friction [ J(kg.m^2) F(N.m.s) p() Tf(N.m)] - Механические параметры[0.0027 0.0004924 4 0] (по умолчанию) | трехэлементный вектор | четырехэлементный векторКомбинированная машина и коэффициент инерции нагрузки J (kg.m2), комбинированный коэффициент вязкого трения F (N.m.s), пары полюсов p и статическое трение вала Tf (N.m). Если четвертое значение вектора (статическое трение) не задано, блок рассматривает это значение как 0.
Чтобы включить этот параметр, установите Mechanical input равным Torque Tm или Mechanical rotational port.
Pole pairs p () - Количество пар полюсов4 (по умолчанию) | положительная скалярная величинаКоличество пар шестов, p.
Чтобы включить этот параметр, установите Mechanical input равным Speed w.
Initial conditions [ wm(rad/s) thetam(deg) ia,ib(A) ] - Начальные условия для трехфазной машины[0,0, 0,0] (по умолчанию) | четырехэлементный векторМеханическая скорость (rad/s), механический угол Θm (степени) и мгновенный ток статора (A) для машины с тремя фазами [wm, Θm, ia, ib].
Поскольку статор соединен «wye», а нейтральная точка изолирована, ток ic в трехфазной машине задается ic = -ia-ib.
Чтобы включить этот параметр, установите Number of phases равным 3.
Initial conditions [ wm(rad/s) thetam(deg) ia,ib,ic,id(A) ] - Начальные условия для пятифазной машины[0 0 0 0 0 0] (по умолчанию) | вектор с шестью элементамиМеханическая скорость (rad/s), механический угол Θm (степени) и мгновенный ток статора (A) для машины с пятью фазами [wm, Θm, ia, ib, ic, id].
Поскольку статор соединен «wye», а нейтральная точка изолирована, ток ie в пятифазной машине задается как ie = -ia -ib -ic -id.
Чтобы включить этот параметр, установите Number of phases равным 5.
Rotor flux position when theta = 0 - Исходное положение потока ротора90 degrees behind phase A axis (modified Park) (по умолчанию) | Aligned with phase A axis (original Park)Исходное положение потока ротора относительно оси А фазы.
Выберите 90 degrees behind phase A axis (modified Park) для выбора исходного положения ротора, представленного:
Измененное преобразование Park [4] более удобно для управления вектора, потому что максимальная индукция фазы происходит при theta = 0.
Выберите Aligned with phase A axis (original Park) для выбора исходного положения ротора, представленного:
Чтобы включить вкладку Advanced, установите параметр Simulation type блока powergui равным Discrete и на вкладке Preferences очистите параметр Automatically handle discrete solver and Advanced tab solver settings of blocks.
Discrete solver model - Метод интегрированияTrapezoidal non iterative (по умолчанию) | Trapezoidal robust | Backward Euler robustМетод интегрирования, используемый блоком.
Когда вы выбираете параметр Automatically handle discrete solver and Advanced tab solver settings of blocks в блоке powergui, дискретная модель решателя автоматически устанавливается на Trapezoidal robust.
Trapezoidal non iterative требует, чтобы вы добавили незначительную нагрузку шунта на терминалах машины, чтобы поддерживать стабильность симуляции, и симуляция может не сходиться и не остановиться, когда количество машин увеличивается в модели.
Trapezoidal robust и Backward Euler robust позволяют устранить необходимость использования паразитарных нагрузок. Чтобы исключить топологические ошибки машин, подключенных к индуктивной схеме (для примера, выключатель, соединенный последовательно с машиной), машина моделирует незначительную внутреннюю нагрузку 0.01% номинальной степени.
Trapezoidal robust немного точнее Backward Euler robust, особенно, когда модель моделируется в большие шаги расчета. Trapezoidal robust может привести к легким демпфированным численным колебаниям напряжения машины в условиях отсутствия нагрузки, в то время как Backward Euler robust предотвращает колебания и поддерживает точность.
Для получения дополнительной информации о том, какой метод использовать в вашем приложении, смотрите Симуляция дискретизированных электрических систем.
Sample time (-1 for inherited) - Шаг расчета, используемая блоком-1 (по умолчанию) | скаляромШаг расчета, используемого блоком. Чтобы наследовать шаг расчета, заданную в блоке powergui, установите этот параметр равным -1 (по умолчанию).
The power_brushlessDCmotor пример иллюстрирует использование блока Permanent Magnet Synchronous Machine.
[1] Гренье, Д., Л.-А. Dessaint, O. Akhrif, Y. Bonnassiux, and B. LePioufle. Экспериментальное нелинейное управление крутящим моментом синхронного двигателя с постоянными магнитами с использованием Saliency. IEEE® Сделки с промышленной электроникой, том 44, № 5, октябрь 1997 года, стр. 680-687.
[2] Toliyat, H.A. «Анализ и симуляция приводов с многофазной переменной скоростью асимметричных соединений». Конференция и экспозиция по прикладной степени, том 2, март 1996, стр. 586-592.
[3] Beaudart, F., F. Labrique, E. Matagne, D. Telteux, and P. Alexandre. Управление при нормальной и отказоустойчивой операции многофазных синхронных машин SMPM с механически и магнитно развязанными фазами. Международная конференция по степени, энергетике и электроприводам, март 2009 года, стр. 461-466.
[4] Krause, P.C., O. Wasynczuk, and S.D. Судхофф. Анализ электрических машин и приводных систем. IEEE Press, 2002.
