Управление ПИ в дискретном времени с интегральным анти-насыщением
Simscape/Электрический/Управление/Общее управление
Блок Discrete PI Controller with Integral Anti-Windup реализует дискретное управление ПИ с внутренним анти-насыщением. Рисунок показывает эквивалентную схему для контроллера с внутренней анти-обмоткой.
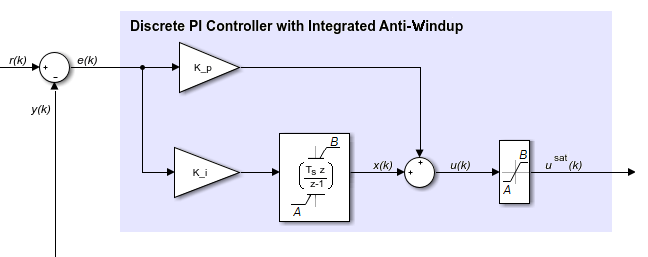
Блок вычисляет управляющий сигнал с помощью метода дискретизации Эйлера назад:
где:
u является управляющим сигналом.
Kp - коэффициент пропорциональной составляющей.
e - сигнал ошибки.
Ki - коэффициент интегральной составляющей.
Ts - период дискретизации.
A - нижний предел насыщения.
B - верхний предел насыщения.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. Стд- 421.5/D39 IEEE. Piscataway, NJ: IEEE-SA, 2015.




