Дискретное ПИ-контроллер с внешним входом защиты от обмотки возбуждения
Simscape/Электрический/Управление/Общее управление
Блок Discrete PI Controller реализует дискретное управление ПИ с внешним входом анти-насыщения.
Эта схема является эквивалентной схемой для контроллера с внешним входом защиты от обмотки.
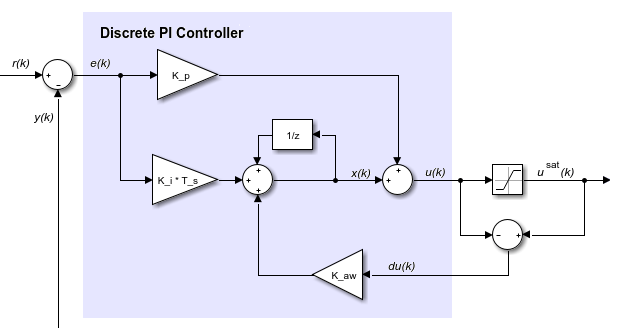
Блок Discrete PI Controller вычисляет управляющий сигнал с помощью метода дискретизации Эйлера назад:
где
u является управляющим сигналом.
Kp - коэффициент пропорциональной составляющей.
Ki - коэффициент интегральной составляющей.
Kaw - коэффициент усиления анти-насыщения.
Ts - период дискретизации.
e - сигнал ошибки.
Чтобы предотвратить чрезмерное перерегулирование, блок может использовать обратное вычисление для реализации внешнего механизма защиты от насыщения. Это вводит du(k), различие между насыщенным сигналом управления, usat(k) и вычисленный ненасыщенный сигнал управления, u(k). Затем он умножает различие на коэффициент защиты от обмотки и добавляет усиленный сигнал от интегральной составляющей.
[1] Öström, K. and T. Hägglund. Усовершенствованное управление ПИД. Исследовательский треугольный парк, NC: ISA, 2005.



