Драйвер мотора H-моста
Simscape/Электрический/Полупроводники и конвертеры/Конвертеры
Блок H-Bridge представляет драйвер мотора H-моста. Блок имеет следующие две опции Simulation mode:
PWM - Выход блока H-Bridge является управляемым напряжением, которое зависит от входного сигнала в порте PWM. Если входной сигнал имеет значение, больше, чем Enable threshold voltage значения параметров, выход H-Bridge блока включен и имеет значение, равное значению параметра Output voltage amplitude. Если это значение меньше, чем Enable threshold voltage значения параметров, блок поддерживает схему нагрузки с помощью одной из следующих трех опций Freewheeling mode:
Via one semiconductor switch and one freewheeling diode
Via two freewheeling diodes
Via two semiconductor switches and one freewheeling diode
Первые и третьи опции иногда называются синхронной операцией.
Сигнал на REV порте определяет полярность выхода. Если значение сигнала в REV порте меньше, чем значение параметра Reverse threshold voltage, выход имеет положительную полярность; в противном случае он имеет отрицательную полярность.
Averaged - Этот режим имеет две опции Load current characteristics:
Smoothed
Unsmoothed or discontinuous
The Smoothed опция принимает, что ток практически непрерывен из-за индуктивности нагрузки. В этом случае выход блока H-Bridge:
где:
VO - значение параметра Output voltage amplitude.
VPWM - значение напряжения в порту PWM.
APWM - значение параметра PWM signal amplitude.
IOUT - значение выходного тока.
RON является параметром Bridge on resistance.
Ток будет плавным, если частота ШИМ достаточно велика. Синхронная операция, при которой свободная волна происходит через рычаг моста назад к источнику питания, также помогает сглаживать ток. Для случаев, когда ток не гладкий или, возможно, прерывистый (то есть он переходит в нуль между циклами PWM), используйте Unsmoothed or discontinuous опция. Для этой опции необходимо также указать значения для Total load series resistance, Total load series inductance и PWM frequency. Во время моделирования блок использует эти значения, чтобы вычислить более точное значение для выходного напряжения H-моста, которое достигает того же среднего тока, что и при симуляции в режиме PWM.
Установите параметр Simulation mode равным Averaged чтобы ускорить симуляции при движении блока H-Bridge с блоком Controlled PWM Voltage. Необходимо также задать параметр Simulation mode блока Controlled PWM Voltage равным Averaged режим. Это применяет среднее требуемое напряжение ШИМ к двигателю. Точность Averaged результаты симуляции режима зависят от валидности вашего предположения о токе нагрузки. Если вы задаете, что ток Unsmoothed or discontinuous, тогда точность также зависит от значений, которые вы обеспечиваете для сопротивления нагрузки и индуктивности, будучи репрезентативной. Этот режим также делает некоторые упрощающие допущения относительно базовых уравнений для случая, когда ток прерывистый. Для типичных параметров мотора и моста точность должна быть в пределах нескольких процентов. Чтобы проверить Averaged точность режима, запустите симуляцию с помощью PWM режим и сравнение результатов с результатами, полученными при использовании Averaged режим.
Режим торможения активируется, когда напряжение, представленное в порту BRK, больше, чем Braking threshold voltage. Независимо от того, в PWM или Averaged mode, когда в режиме торможения H-мост моделируется последовательной комбинацией двух сопротивлений R1 и R2 где:
R1 - сопротивление одного мостового рычага, то есть половину значения параметра Total bridge on resistance.
R2 - сопротивление одного мостового рычага параллельно диодному сопротивлению, то есть R1· Rd/( R1 + Rd), где Rd - диодное сопротивление.
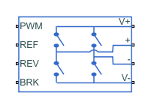
Чтобы смоделировать требования, предъявляемые к источнику постоянного тока, можно выбрать, чтобы показать порты источника степени блока H-Bridge путем установки параметра Power supply на External. Если порты источника степени открыты, поддерживается только режим симуляции ШИМ.
Примечание
Если для параметра Power supply задано значение Externalблок способен вычислить смещение напряжения на стороне нагрузки путем ссылки на напряжения шинопровода электропитания. Однако, если соединения шинопровода электропитания не являются пустыми, необходимо добавить блок Electrical Reference на стороне нагрузки.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловой порт, H на значке блока, и добавляет параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Когда тепловой порт видим:
Тепло, выделяемое диодами сопротивления мостика и свободного хода, добавляется к тепловому порту. Тепловой порт имеет связанную тепловую массу и начальную температуру, которые можно задать из параметров Thermal Port.
Сопротивление диода на мостике и сопротивление диода свободного хода становятся функциями температуры. Можно задать значения для этих сопротивлений и второй температуры измерения из параметров Temperature Dependence. Сопротивление принято линейно изменяющимся между двумя температурами измерения. Экстраполяция используется для температур вне этой области значений, кроме при симуляции в усредненном режиме с прерывистыми характеристиками тока нагрузки.
Если вы линеаризируете модель, установите параметр Simulation mode равным Averaged и убедитесь, что вы правильно определили рабочую точку. Можно линеаризировать H-Bridge блок только для коэффициентов заполнения, которые больше нуля и меньше, чем амплитуда сигнала PWM. Если вам нужно линеаризироваться вокруг нулевого коэффициента заполнения, и если ваш контроллер всегда использует режим регенеративного торможения, установите параметр Regenerative braking равным Always enabled (suitable for linearization).
В Averaged mode, и с Unsmoothed or discontinuous для Load current characteristics необходимо предоставить репрезентативные значения индуктивности и сопротивления нагрузки. Если привод двигателя постоянного тока, то сопротивление является сопротивлением якоря, а индуктивность является суммой индуктивности якоря плюс последовательной сглаживающей индуктивности (если она присутствует). Для Универсального Двигателя полное сопротивление является суммой обмотки якоря и обмотки возбуждения, а общая индуктивность является суммой индуктивности якоря и возбуждения плюс любая последовательная индуктивность сглаживания. Для двигателя Двигателя постоянного тока с параллельным возбуждением рекомендует нарисовать эквивалентную схему Тевенина, чтобы определить соответствующие значения.
Никакое прямое напряжение не моделируется для свободных диодов. Они аппроксимируются как идеальные сопротивления при смещении вперед с сопротивлением, равным Freewheeling diode on resistance значению параметров.
Если шинопроводы электропитания соединения доступны, поддерживается только режим симуляции PWM.


