Адаптивное управление на основе ПИД модели-ссылки дискретного времени
Simscape/Электрический/Управление/Общее управление
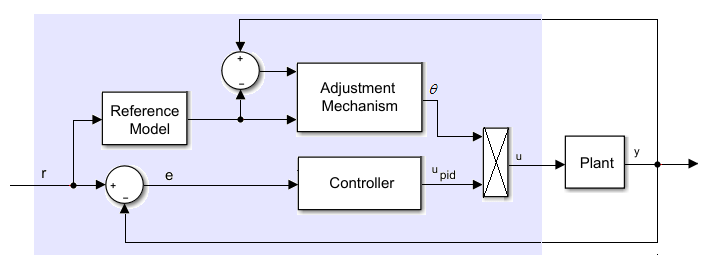
Блок Model Reference Adaptive Controller реализует дискретное пропорционально-интегрально-производное (PID) эталонное адаптивное управление (MRAC). Тремя основными компонентами системы MRAC являются образец модели, механизм регулировки и контроллер.
Управляющее уравнение
где:
upid - контроллер выход.
Kp - пропорциональная составляющая.
Ki - интегральная составляющая.
Kd - дифференциальный коэффициент усиления.
Ts является шагом расчета.
e - ошибка.
Образец модели является передаточной функцией для системы с обратной связью. Эта модель захватывает желаемое поведение системы с обратной связью. Это реализовано как передаточная функция в дискретном времени
Механизм адаптации регулирует действие управления на основе ошибки между выходом объекта управления и выходом образца модели как
где:
θ является параметром адаптации.
y - выход объекта управления.
ym - это образец модели выхода.
γ является скоростью обучения.
Увеличение значения γ приводит к более быстрой адаптации к изменениям объектов.
Скорректированный сигнал управления, u, является
[1] Батлер, H. Model-Reference Adaptive Control-From Theory to Practice. Верхняя Седл-Ривер, Нью-Джерси: Prentice Hall, 1992.
