Прогнозирующее управление с использованием полиномиального представления
Simscape/Электрический/Управление/Общее управление
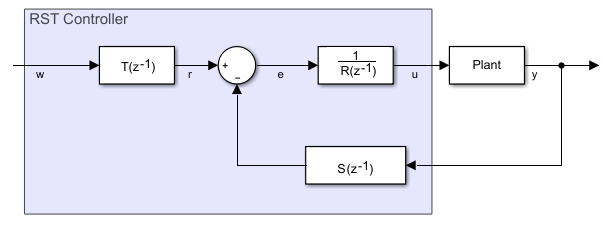
Блок RST Controller реализует обобщенный прогнозирующий контроллер, используя опорный сигнал отслеживающее полиномиальное представление. Схема показывает эквивалентную схему для алгоритма управления.
Управляемая авторегрессионная интегрированная модель скользящего среднего значения (CARIMA) описывает объект:
где:
d является системой с потерей времени.
y(k) - выход объекта управления.
u(k) - контроллер выход.
e(k) - белый шум с нулевым средним значением.
A (z-1) и B (z-1) являются полиномами системы.
nA и nB являются полиномами степеней.
C (z-1) и D (z-1) являются полиномами нарушения порядка для получения установившейся ошибки.
Модель предсказания задается как
и
где:
hi - это минимальное предсказание.
hp - горизонт предсказания.
Будущая последовательность управления, вычисленная в момент k,
где
а hc - горизонт управления.
Предсказанные значения выхода
Чтобы определить полиномы системы, , , и , блок использует два диофантовых уравнения. Первое диофантово уравнение
где:
Второе диофантово уравнение
где:
Получившаяся модель предсказания
где
представляет свободный ответ системы.
Используя матричное обозначение, модель предсказания может быть записана как
где:
Чтобы минимизировать ошибку отслеживания и контроллер выход, блок использует функцию затрат. Чтобы компромиссировать между минимизацией ошибки отслеживания и минимизацией контроллер выхода, блок использует весовой коэффициент
для
и
где w - ссылка траектории. Минимизация функции стоимости приводит к уравнению для оптимальной последовательности управления:
Как γj и являются элементами в первой строке матрицы , применение принципа отступающего горизонта приводит к уравнению алгоритма управления как
Замена с использованием приводит к такой форме уравнения алгоритма управления:
Полиномиальная форма алгоритма управления следующая как
где:
и
Чтобы получить R, R и T полиномы, используйте дискретное время вместо передаточной функции в непрерывном времени.
[1] Camacho, E. F. and C. Bordons. Моделируйте прогнозирующее управление. Second Edition, London: Springer, 2007.


