Линейный синхронный двигатель с постоянными магнитами с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
Блок PMLSM моделирует линейный синхронный двигатель с постоянными магнитами с трехфазным статором с соединением обмоток в «звезду». Рисунок показывает эквивалентную электрическую схему для обмоток статора.
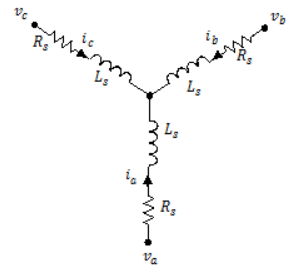
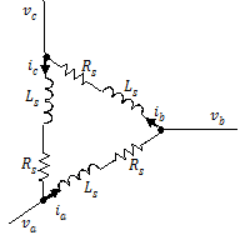
Можно также смоделировать линейный синхронный двигатель с постоянными магнитами в строение с дельта-обмоткой путем установки Winding type на Delta-wound.
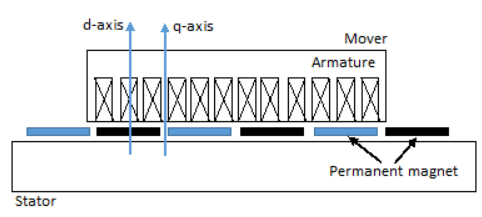
Этот рисунок показывает конструкцию мотора.
Напряжения на обмотках статора определяются:
где:
va, vb и vc являются отдельными фазными напряжениями на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянные магниты и три обмотки способствуют общему потоку, связывающему каждую обмотку. Общий поток определяется:
где:
ψa, ψb и ψc являются суммарными потоками, связывающими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндуктивностями обмоток статора.
Lab, Lac, Lba, Lbc, Lca, и Lcb являются взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянных магнитов, связывающими обмотки статора.
Индуктивность в обмотках статора является функцией электрического угла и определяется:
и
где:
θe - электрический угол.
rotor offset 0 если вы задаете электрический угол ротора относительно оси D, или -pi/2 если вы задаете электрический угол ротора относительно оси q.
и τ является полярным тангажом.
x - расстояние.
Ls является самоиндуктивностью статора на фазу. Это значение является средней индуктивностью каждой из обмоток статора.
Lm - индуктивность статора. Это значение является колебанием самоиндуктивности и взаимной индуктивности с изменением угла.
Ms является взаимной индуктивностью статора. Это значение является средней взаимной индуктивностью между обмотками статора.
a обмотки потокосцепления с постоянными магнитами является максимальным, когда θe = 0 ° и нули θe = 90 °. Поэтому связанный поток мотора определяется:
где ψm - редактирование потока постоянных магнитов.
Применение преобразования Парка к электрическим уравнениям создает выражение для силы, которая не зависит от угла.
Преобразование Парка определяется:
где θe - электрический угол, заданный как Npx.
Использование преобразования Парка на напряжениях и токах обмотки статора преобразует их в систему координат dq0, которая не зависит от угла:
и
Применение преобразования Парка к первым двум электрическим уравнениям приводит к следующим уравнениям, которые определяют поведение блоков:
и
где:
Ld = Ls + Ms + 3/2 <reservedrangesplaceholder2>. Ld - индуктивность d оси статора.
Lq = Ls + <reservedrangesplaceholder3> − 3/2 <reservedrangesplaceholder2>. Lq - индуктивность q оси статора.
L0 = Ls – 2 Ms. L0 - индуктивность нулевой последовательности статора.
Rs - сопротивление статора на фазу.
v - линейная скорость.
Np - коэффициент полярного тангажа.
M - масса движителя.
Bm - демпфирование.
FL - сила нагрузки.
Блок PMLSM использует исходную, неортогональную реализацию преобразования Park. Если вы пытаетесь применить альтернативную реализацию, вы получаете различные результаты для напряжения dq0 и токов.
Отношение между постоянными kf силы, постоянными ke заднего ЭДС и потоком постоянных магнитов определяется следующим образом:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Андерсон, П. М. Анализ неисправных степеней. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
[3] X. Zhang and J. Pan. Нелинейное управление робастным скользящим режимом для линейных синхронных двигателей PM. 2006 CES/IEEE 5-я Международная конференция по степени и управлению движением, Шанхай, 2006, стр. 1-5.

