Синхронный двигатель с постоянными магнитами с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
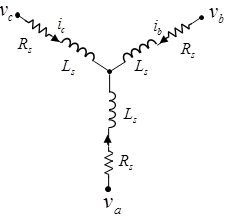
Блок PMSM моделирует синхронный двигатель с постоянными магнитами с трехфазным статором с соединением обмоток в «звезду». Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Для этого блока можно выбрать различные встроенные параметры. Для получения дополнительной информации см. раздел «Предопределенная параметризация».
Этот рисунок показывает конструкцию мотора с одной парой полюсов на роторе.
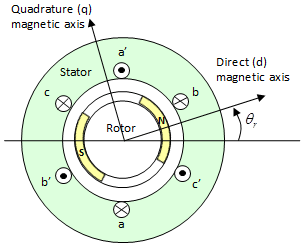
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения о осях на предыдущем рисунке a-фазы и потоки постоянных магнитов выравниваются, когда механический угол ротора, θr, равен нулю. Блок поддерживает определение второй оси ротора, в котором механический угол ротора определяется как угол между магнитной осью a-фазы и осью q ротора -.
Напряжения на обмотках статора определяются:
где:
va, vb и vc являются отдельными фазными напряжениями на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянные магниты и три обмотки способствуют общему потоку, связывающему каждую обмотку. Общий поток определяется:
где:
ψa, ψb и ψc являются суммарными потоками, связывающими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндуктивностями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивностями обмоток статора.
ψam, ψbm и ψcm являются потоками постоянных магнитов, связывающими обмотки статора.
Индуктивности в обмотках статора являются функциями электрического угла ротора, заданными как:
и
где:
θr - механический угол ротора.
θe - электрический угол ротора.
rotor offset 0 если вы задаете электрический угол ротора относительно оси D, или -pi/2 если вы задаете электрический угол ротора относительно оси q.
Ls является самоиндуктивностью статора на фазу. Это значение является средней индуктивностью каждой из обмоток статора.
Lm - индуктивность статора. Это значение является колебанием самоиндуктивности и взаимной индуктивности с изменением угла ротора.
Ms является взаимной индуктивностью статора. Это значение является средней взаимной индуктивностью между обмотками статора.
a обмотки потокосцепления с постоянными магнитами является максимальным, когда θe = 0 ° и нули θe = 90 °. Поэтому связанный поток мотора определяется:
где ψm - редактирование потока постоянных магнитов.
Применение преобразования Парка к электрическим уравнениям блока создает выражение для крутящего момента, которое не зависит от угла ротора.
Преобразование Парка определяется:
где θe - электрический угол, заданный как Nθr. N - количество пар полюсов.
Использование преобразования Парка на напряжениях и токах обмотки статора преобразует их в систему координат dq0, который не зависит от угла ротора:
и
Применение преобразования Парка к первым двум электрическим уравнениям приводит к следующим уравнениям, которые определяют поведение блоков:
и
где:
Ld = Ls + Ms + 3/2 <reservedrangesplaceholder2>. Ld - индуктивность d оси статора.
Lq = Ls + <reservedrangesplaceholder3> − 3/2 <reservedrangesplaceholder2>. Lq - индуктивность q оси статора.
L0 = Ls – 2 Ms. L0 - индуктивность нулевой последовательности статора.
ω - механическая скорость вращения ротора.
N - количество пар полюсов постоянных магнитов ротора.
T - крутящий момент ротора. Крутящий момент течет от корпуса мотора (блокирующий физический порт C) к ротору мотора (блокирующий физический порт R).
Блок PMSM использует исходную, неортогональную реализацию преобразования Park. Если вы пытаетесь применить альтернативную реализацию, вы получаете различные результаты для напряжения dq0 и токов.
Можно параметризовать двигатель с помощью констант коэффициента противо-ЭДС или крутящего момента, которые чаще всего приводятся в таблицах данных электродвигателя при помощи опции Permanent magnet flux linkage.
Коэффициент противо-ЭДС, постоянная определяется как пиковое напряжение, индуцируемое постоянными магнитами в каждой из фаз на модуль скорости вращения. Это связано с пиковым потоком постоянных магнитов, редактирования:
Из этого определения следует, что коэффициент противо-ЭДС eph для одной фазы определяется:
Константа крутящего момента определяется как пиковый крутящий момент, вызываемый каждой из фаз на единичный ток. Он численно идентичен по значению коэффициента противо-ЭДС, постоянная, когда оба выражены в модули СИ:
Когда Ld = Lq, и когда токи во всех трех фазах сбалансированы, из этого следует, что объединенный T крутящего момента задается:
где Ipk - пиковый ток в любой из трех обмоток.
Из этого следует, что коэффициент 3/2 является установившейся суммой крутящих моментов от всех фаз. Поэтому kt крутящего момента также может быть определено как:
где T - измеренный суммарный крутящий момент при испытании сбалансированным трехфазным током с пиковой линией напряжением Ipk Запись в терминах тока линии RMS:
Потери в железе разделены на два члена, один из которых представляет основную траекторию намагничивания, а другой представляет траекторию поперечного совета зуба, которая становится активной во время ослабленных операций поля. Модель потерь в железе, которая основана на работе Меллора [3].
Термин, представляющий основной путь намагничивания, зависит от индуцированного напряжения линии RMS к нейтралю статора, :
Это доминирующий термин во время работы без нагрузки. k является коэффициентом противо-ЭДС, постоянная, относящимся к RMS В на Гц. Он определяется как , где f является электрической частотой. Первый член на правой стороне является потерей магнитного гистерезиса, второй - потеря токов Фуко, третий - избыточные потери. Три коэффициента, появляющиеся на числителях, получают из значений, которые вы обеспечиваете для гистерезиса без обратной связи, вихря и избыточных потерь.
Термин, представляющий путь совета поперек зуба, становится важным, когда устанавливается поле размагничивания, и может быть определен из анализа короткой схемы тестирования конечного элемента. Это зависит от RMS ЭДС, связанной с потоком поперечных советов, :
Три члена числителя получают из значений, которые вы обеспечиваете для гистерезиса короткой схемы, вихря и избыточных потерь.
Существует несколько доступных встроенных параметров для блока PMSM.
Эти данные предварительной параметризации позволяют настроить блок для представления компонентов определенными поставщиками. Параметризации этих синхронных двигателей с постоянными магнитами соответствуют таблицам данных производителя. Чтобы загрузить предопределенную параметризацию, щелкните гиперссылку Select a predefined parameterization в маске блока PMSM и выберите элемент, который вы хотите использовать, из списка доступных компонентов.
Примечание
Предопределенные параметризации компонентов Simscape используют доступные источники данных для подачи значений параметров. Инженерные суждения и упрощающие допущения используются для заполнения недостающих данных. В результате следует ожидать отклонений между моделируемым и фактическим физическим поведением. Чтобы гарантировать необходимую точность, вы должны проверить моделируемое поведение на основе экспериментальных данных и уточнить модели компонента по мере необходимости.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток и по одному для ротора. Эти порты по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite three-phase ports | Show thermal port или Expanded three-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты сопротивления меди и потерь в железе, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Андерсон, П. М. Анализ неисправных степеней. Hoboken, NJ: Wiley-IEEE Press, 1995.
[3] Меллор, П.Х., Р. Вробель и Д. Холлидей. «Вычислительно эффективная модель потери в железе для бесщеточных машин переменного тока, которая удовлетворяет номинальным потокам и полевым ослабленным операциям». Конференция по электрическим машинам и приводам IEEE. Май 2009.




