Пятифазный синхронный двигатель с постоянными магнитами с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
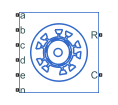
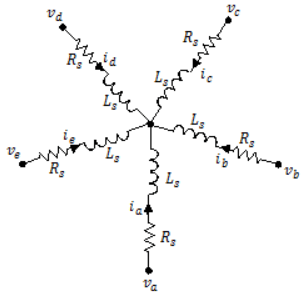
Блок PMSM (Five-Phase) моделирует синхронный двигатель с постоянными магнитами с пятифазным статором со звездной обмоткой. Рисунок показывает эквивалентную электрическую схему для статорных обмоток со звездочкой.
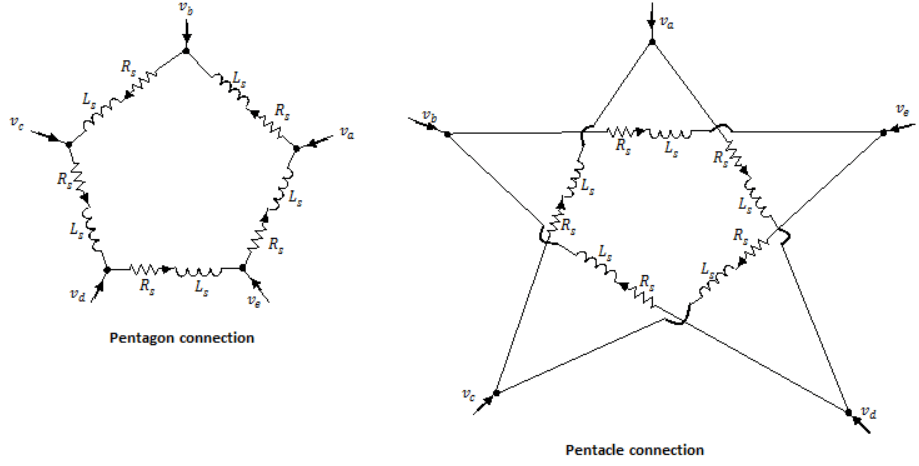
Можно также смоделировать синхронный двигатель с постоянными магнитами или в конфигурации с пятиугольником, или в строении с пятиугольником путем установки Winding type на Pentagon-wound или Pentacle-wound.
Этот рисунок показывает конструкцию мотора с одной парой полюсов на роторе.
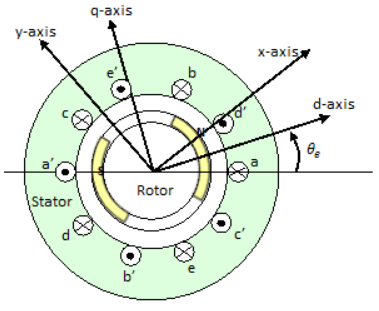
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения о осях на предыдущем рисунке a-фазы и потоки постоянных магнитов выравниваются, когда механический угол ротора, θr, равен нулю. Блок поддерживает определение второй оси ротора, в котором механический угол ротора задан как угол между a магнитной осью -фазы и осью q ротора -.
Напряжения на обмотках статора определяются:
где:
va, vb, vc, vd, и ve являются отдельными напряжениями фазы через обмотки статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib, ic, id, и ie являются током, текущим в обмотках статора.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянные магниты и пять обмоток способствуют общему потоку, связывающему каждую обмотку. Общий поток определяется:
где:
ψa, ψb, ψc, ψd, и ψe являются полными потоками, которые связывают каждую обмотку статора.
Laa, Lbb, Lcc, Ldd, и Lee являются самоиндукциями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивностями обмоток статора.
ψam, ψbm, ψcm, ψdm, и ψem являются потоками постоянного магнита, связывающими обмотки статора.
Индуктивности в обмотках статора являются функциями электрического угла ротора, заданными как:
и
где:
θr - механический угол ротора.
θe - электрический угол ротора.
rotor offset pi/2 если вы задаете электрический угол ротора относительно оси D, или 0 если вы задаете электрический угол ротора относительно оси q.
Ls является самоиндуктивностью статора на фазу. Это значение является средней индуктивностью каждой из обмоток статора.
Lm - индуктивность статора. Это значение является колебанием самоиндуктивности и взаимной индуктивности с изменением угла ротора.
Ms является взаимной индуктивностью статора. Это значение является средней взаимной индуктивностью между обмотками статора.
Обмотка связи с постоянными магнитами a-a' на максимуме, когда θe = 0 ° и нули, когда θe = 90 °. Поэтому связанный поток мотора определяется:
где ψm - редактирование потока постоянных магнитов.
Чтобы удалить зависимость угла ротора для индуктивных членов, вы выполняете преобразование, T, на уравнениях мотора.
Преобразование T определяется:
где θe - электрический угол, заданный как Nθr. N - количество пар полюсов.
Матрица преобразования имеет следующее псевдоортогональное свойство:
Использование преобразования T на напряжениях и токах обмотки статора преобразует их в системы координат dq0 и xy, которые не зависят от угла ротора:
и
Применение этого преобразования к первым двум электрическим уравнениям приводит к следующим уравнениям, которые определяют поведение блоков:
и
где:
Ld = Ls + Ms + 5/2 <reservedrangesplaceholder2>. Ld - индуктивность d оси статора.
Lq = Ls + <reservedrangesplaceholder3> − 5/2 <reservedrangesplaceholder2>. Lq - индуктивность q оси статора.
L0 = Ls – 4 Ms. L0 - индуктивность нулевой последовательности статора.
ω - механическая скорость вращения ротора.
N - количество пар полюсов постоянных магнитов ротора.
Можно параметризовать двигатель с помощью констант коэффициента противо-ЭДС или крутящего момента, которые чаще всего приводятся в таблицах данных электродвигателя, с помощью опции Permanent magnet flux linkage.
Коэффициент противо-ЭДС, постоянная определяется как пиковое напряжение, индуцируемое постоянными магнитами в каждой из скоростей вращения фазы в относительных единицах. Это связано с пиковым потоком постоянных магнитов, редактирования:
Из этого определения следует, что коэффициент противо-ЭДС, eph, для одной фазы задаётся:
Константа крутящего момента определяется как пиковый крутящий момент, вызываемый током каждой из фаз в относительных единицах. Он численно идентичен по значению коэффициента противо-ЭДС, постоянная, когда оба выражены в модули СИ:
Когда Ld = Lq, и когда токи во всех пяти фазах сбалансированы, из этого следует, что объединенный T крутящего момента задается:
где Ipk - пиковый ток в любой из трех обмоток.
Коэффициент 5/2 вычисляется из установившейся суммы крутящих моментов из всех фаз. Поэтому kt крутящего момента также может быть определено как:
где T - измеренный суммарный крутящий момент при испытании сбалансированным трехфазным током с пиковым напряжением линии Ipk. Напряжение линии RMS измеряется как:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Л. Парса и Х. А. Толият. Бездатчиковое прямое управление крутящим моментом приводов с пятифазным внутренним приводом с постоянными магнитами. Транзакции IEEE по отраслевым приложениям, том 43, № 4, стр. 952-959, июль-август 2007.
[2] Андерсон, П. М. Анализ неисправных степеней. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
