Вращательный трансформатор, который измеряет угол поворота
Simscape/Электрический/Датчики и датчики

Блок Resolver моделирует типовой решатель, который измеряет электрический угол фазы сигнала через электромагнитную связь. Решатель состоит из вращающегося трансформатора, который связывает напряжение переменного тока, приложенное к первичной обмотке, с двумя вторичными обмотками. Эти вторичные обмотки физически ориентированы на 90 степени друг к другу. Когда угол ротора изменяется, изменяется относительное сцепление между основной и двумя вторичными обмотками. В модели Resolver блока первая вторичная обмотка ориентирована так, что пиковое сцепление происходит, когда ротор находится в нулевых степенях, и, следовательно, вторая вторичная обмотка имеет минимальное сцепление, когда ротор находится в нулевых степенях.
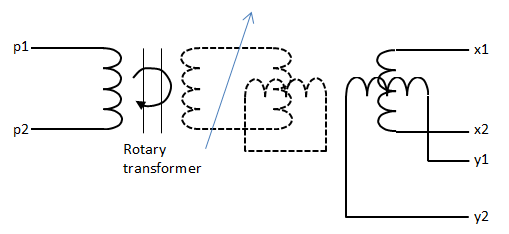
Без потерь общности принято, что трансформатор между первым и роторным контурами идеален с отношением 1:1. Это приводит к тому, что ток и напряжение ротора эквивалентны первичному току и напряжению.
У вас есть две опции для определения блочных уравнений:
Опустите динамику, пренебрегая индуктивными терминами трансформатора. Эта модель действительна, только если датчик управляется синусоида, потому что любой компонент постоянного тока на основной стороне перейдет на выход сторону.
Включите индуктивные условия, тем самым захватив потери амплитуды напряжения и различий фаз. Эта модель действительна для любой входной формы волны. В рамках этой опции можно либо задать индуктивность и коэффициент пиковой связи непосредственно, либо задать коэффициент преобразования и измеренные импедансы, в этом случае блок использует эти значения для определения индуктивных членов.
Уравнения основаны на наложении двух идеальных трансформаторов, оба с коэффициентами связи, которые зависят от угла ротора. Два идеальных трансформатора имеют общую первичную обмотку. Смотрите Simscape™ Ideal Transformer блочные страницы с описанием для получения дополнительной информации о моделировании идеальных трансформаторов. Уравнения:
Kx = R cos (N Θ )
Ky = R sin (N Θ )
vx = Kx v p
vy = Ky v p
ip = – <reservedrangesplaceholder3> <reservedrangesplaceholder2> – <reservedrangesplaceholder1> <reservedrangesplaceholder0>
где:
vp и ip являются напряжением ротора (или, эквивалентно, первичным) и током, соответственно.
vx и ix являются первым вторичным напряжением и током, соответственно.
vy и iy являются вторым вторичным напряжением и током, соответственно.
Kx - коэффициент связи для первой вторичной обмотки.
Ky - коэффициент связи для второй вторичной обмотки.
R - коэффициент преобразования.
N - количество пар полюсов.
Θ - угол ротора.
Уравнения основаны на наложении двух взаимных индукторов, обе с коэффициентами связи, которые зависят от угла ротора. Две взаимные индуктивности имеют общую первичную обмотку. Смотрите страницу с описанием Simscape Mutual Inductor для получения дополнительной информации о моделировании взаимных индукторов. Уравнения:
где:
vp и ip являются напряжением ротора (или, эквивалентно, первичным) и током, соответственно.
vx и ix являются первым вторичным напряжением и током, соответственно.
vy и iy являются вторым вторичным напряжением и током, соответственно.
Rp - сопротивление ротора (или первичного).
Lp - индуктивность ротора (или первичная).
Rs - сопротивление статора (или вторичного).
Ls является индуктивностью статора (или вторичной).
N - количество пар полюсов.
k - коэффициент связи.
Θ - угол ротора.
Принято, что связь между двумя вторичными обмотками равна нулю.
Таблицы данных обычно не цитируют коэффициент параметров связи и индуктивности, но вместо этого дают коэффициент преобразования R и измеренные импедансы. Если вы выбираете Specify transformation ratio and measured impedances для параметра Parameterization затем значения, которые вы предоставляете, используются для определения значений для коэффициентов уравнения, определенных выше.
Используйте Variables раздел блочного интерфейса, чтобы задать приоритет и начальные целевые значения для основных переменных до симуляции. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Решатель не затягивает крутящий момент между портами механического вращений R и C.
Трансформатор между первым и роторным контурами идеален с отношением 1:1.
Связь между двумя вторичными обмотками равна нулю.

