Ссылка тока синхронной машины
Simscape/Электрический/Управление/SM Управление
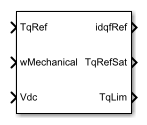
Блок SM Current Reference Generator реализует генератор ссылки тока для управления током синхронной машины (SM) в d ротора - q системе отсчета.
Блок SM Current Reference Generator может получить текущую ссылку с помощью одного из следующих методов:
Нулевое управление по оси D (ZDAC).
Интерполяционные таблицы.
Для метода ZDAC, блоки устанавливают:
Ток оси D ссылки в нуль:
Ссылка на ток поля использование опорного момента крутящего момента:
где if,max - максимальный ток возбуждения, а Tmax - максимальный крутящий момент.
Ток q-оси ссылки использование уравнения крутящего момента:
где Tref - вход опорного крутящего момента, а Kt - константа крутящего момента синхронной машины, выраженная упрощенным уравнением крутящего момента .
Для операции ниже номинальной скорости синхронной машины ZDAC является подходящим методом. Выше номинальной скорости требуется контроллер ослабления поля, чтобы настроить ссылку по оси d.
Чтобы предгенерировать текущие ссылки для нескольких рабочих точек, задайте три интерполяционные таблицы с помощью подхода интерполяционных таблиц:
и
[1] Жирардин, А., и Г. Фридрих. Оптимальное управление генератором синхронного стартера фазного ротора. Отраслевая конференция по применению, 2006, стр. 14-19.
[2] Carpiuc, S., C. Lazar, and D. I. Patrascu. Оптимальное управление крутящим моментом синхронной машины с внешним возбуждением. Контрольная инженерия и прикладная информатика, 14 (2), 2012, стр. 80-88.





