Дискретный или непрерывный вход PSS7C стабилизатор степени
Simscape/Электрический/Управление/SM Управление
Блок SM PSS7C реализует стабилизатор PSS7C степени (PSS) с двойным входом, который поддерживает стабильность угла ротора в синхронной машине (SM) в соответствии с IEEE 421.5-2016[1]. Как правило, вы используете PSS, чтобы усилить демпфирование колебаний степени через управление возбуждением.
Можно представлять два разных типа стабилизаторов степени системы с двойным входом с этой же моделью:
Стабилизатор, который использует электрические сигналы степени и скорости (или частоты), чтобы вычислить интеграл ускоряющейся степени. Это делает вычисленный сигнал стабилизатора нечувствительным к механическим изменениям.
Стабилизатор, который использует комбинацию электрических степеней и скорости или частоты. Чтобы достичь желаемого формирования стабилизирующего сигнала, система использует скорость непосредственно, без компенсации фазового вывода, и добавляет сигнал, который пропорциональен электрической степенью.
Можно переключаться между непрерывной и дискретной реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока.
Эта схема иллюстрирует общую структуру стабилизатора PSS7C степени системы:
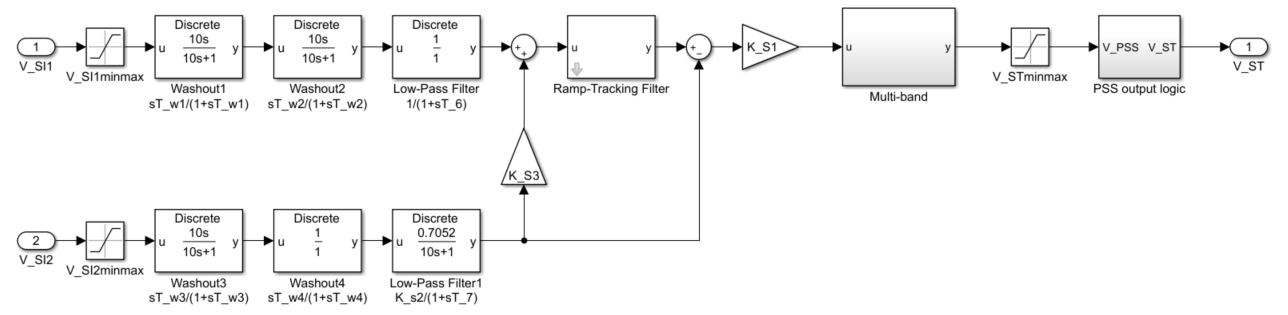
На схеме:
V_SI1 и V_SI2 являются двумя входами стабилизатора степени. Обычно используемые входы являются скоростью, частотой или степенью.
Два блоков Смыва (Дискретный или Непрерывный) представлены для каждого входа стабилизатора, с постоянными временем, TW1 для TW4, наряду с преобразователем, представленным Низкочастотным Фильтром (Дискретный или Непрерывный), с постоянными времени T6 и T7.
Чтобы разрешить характеристику фильтра отслеживания пандуса, подсистема фильтра отслеживания пандуса моделирует сеть блоков фильтра задержки и lowpass последовательно.
Чтобы предоставить фазе компенсацию, подсистема Multi-band реализует уравнение канонического состояния с постоянными временем, Ti1 к Ti4 и усилениями, K0 к K4.
Выходная логическая подсистема PSS позволяет представлять логику выхода PSS, связанную с генератором, активной степенью выхода. PPSSon и PPSSoff являются пороговыми значениями, используемыми для определения гистерезиса.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
