Lowpass в дискретном или непрерывном времени
Simscape/Электрический/Управление/Общее управление
Блок Low-Pass Filter (Discrete or Continuous) реализует lowpass в соответствии с IEEE 421.5-2016[1]. В стандарте фильтр называется простой временной константой.
Можно переключаться между непрерывной и дискретной реализациями интегратора с помощью параметра Sample time.
Чтобы сконфигурировать фильтр на непрерывное время, задайте значение свойства Sample time 0. Это представление эквивалентно непрерывной передаточной функции:
где:
K - коэффициент усиления фильтра.
T - временная константа фильтра.
Из предшествующей передаточной функции фильтр, определяющий уравнения, являются:
где:
u - вход фильтра.
x - состояние фильтра.
y - выход фильтра.
t - время симуляции.
u0 - начальный вход в блок.
Чтобы сконфигурировать фильтр для дискретного времени, установите свойство Sample time положительное, ненулевое значение или равным -1 наследование шага расчета из вышестоящего блока. Дискретное представление эквивалентно передаточной функции:
где:
K - коэффициент усиления фильтра.
T - временная константа фильтра.
Ts является шагом расчета фильтра.
Из дискретной передаточной функции уравнения фильтра задаются с помощью прямого метода Эйлера:
где:
u - вход фильтра.
x - состояние фильтра.
y - выходы фильтра.
n - временной шаг симуляции.
u0 - начальный вход в блок.
Чтобы задать начальные условия этого блока, установите Initialization в:
Inherited from block input - Блок устанавливает состояние и выходные начальные условия на начальный вход.
Specify as parameter - Блок устанавливает начальное условие состояния на значение Initial state.
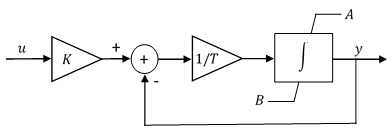
Установите параметры Upper saturation limit и Lower saturation limit, чтобы использовать метод anti-windup насыщения.
Метод анти-насыщения ограничивает состояние интегратора между нижним пределом насыщения A и верхним пределом насыщения B:
Поскольку состояние ограничено, выход может немедленно ответить на обращение входного знака, когда интеграл насыщен. Этот блок схема изображает реализацию метода анти-насыщения насыщения в фильтре.
Этот блок не обеспечивает метод насыщения обмотки. Чтобы использовать метод насыщения обмотки, установите параметр Upper saturation limit равным inf, параметр Lower saturation limit для -inf, и присоедините блок saturation к выходу.
Установите постоянную времени на значение, меньше или равное шагу расчета, чтобы игнорировать динамику фильтра. При обходе блок подает масштабированный по усилению вход непосредственно на выход:
В непрерывном случае шаг расчета и постоянная времени должны быть равны нулю.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.



