Однополюсное реле с двумя контактами с задержками и отказами
Simscape/Электрический/Выключатели и выключатели/Реле

Блок SPDT Relay моделирует однополюсное реле с перекидывающимся контактом. Блок имеет три потенциальных состояния:
Обесточенный - общий контакт, C, соединяется с нормально закрытым контактом, S1.
Под напряжением - общий контакт, C, соединяется с нормально открытым контактом, S2.
Разомкнутая схема - реле открыто. Общий контакт, C, не соединяется с нормально закрытым контактом, S1 или нормально открытым контактом, S2.
Вы можете:
Управляйте состоянием реле, используя входной порт физического сигнала или электрические порты.
Вывод состояния реле.
Задержка разрыва и создания одного или обоих соединений.
Введите поведенческий или временный отказ, который приводит к застреванию соединения, разомкнутой цепи или ухудшению контактного сопротивления.
Блок имеет два варианта управления:
Управление физическим сигналом (PS) - состояние реле зависит от того, как значение входного физического сигнала сравнивается с порогом реле. Порог реле, th, является значением, которое вы задаете для параметра Threshold.
Электрическое управление - состояние реле зависит от того, как ток через положительные и отрицательные электрические порты, которые представляют обмотку реле, сравнивается с верхним и нижним порогами реле. Верхний и нижний пороги зависят от значений, которые вы задаете для параметров в настройках Winding.
Для варианта управления PS, в начале симуляции:
Если входной сигнал, PS, меньше или равен th, реле обесточивается, и общий контакт, C, соединяется с нормально замкнутым контактом, S1.
Если входной сигнал, PS, больше th, реле подается питание и C соединяется с нормально открытым контактом, S2.
После начала симуляции, если PS поднимается выше th, блок переходит из обесточенного состояния в включенное состояние:
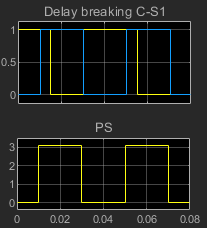
Соединение C - S1 обрывается после задержки, указанной в Time-to-break C-S1 connection .
Соединение C - S2 закрывается после задержки, указанной в Time-to-make C-S2 connection.
Если блок переходит из включенного состояния в обесточенное состояние, то есть PS падает до или ниже th:
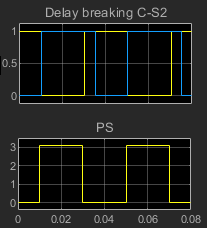
Соединение C - S2 обрывается после задержки, указанной в Time-to-break C-S2 connection .
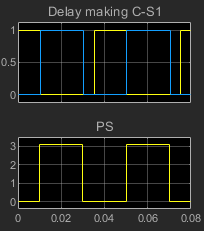
Соединение C - S1 закрывается после задержки, указанной в Time-to-make C-S1 connection.
Для варианта электрического управления верхний и нижний пороги зависят от заданных значений для параметров Rated voltage, Percent rated voltage to energize, Percent rated voltage to de-energize и Winding series resistance. Номинальный ток:
Уравнение для верхнего порога тока, ienergized, является:
Уравнение для нижнего порога тока, ide-energized, является:
В начале симуляции:
Если ток управления меньше ienergized, общий контакт, C, соединяется с нормально закрытым контактом, S1.
Если ток управления больше ienergized, реле возбуждается и C соединяется с нормально открытым контактом, S2.
После начала симуляции, если ток поднимается выше ienergized, блок переходит из обесточенного состояния в включенное состояние:
Соединение C - S1 обрывается после задержки, указанной в Time-to-break C-S1 connection .
Соединение C - S2 закрывается после задержки, указанной в Time-to-make C-S2 connection.
Если ток падает ниже ide-energized, блок переходит из включенного состояния в обесточенное состояние:
Соединение C - S2 обрывается после задержки, указанной в Time-to-break C-S2 connection .
Соединение C - S1 закрывается после задержки, указанной в Time-to-make C-S1 connection.
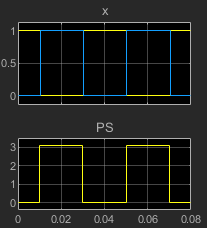
Чтобы просмотреть состояние реле, откройте порт x, порт физического сигнала, который выводит состояние каждого соединения. Чтобы открыть x порт, в настройках Main установите State port Visible.
Таблица показывает, как состояние реле связано с состоянием соединений. Закрытое соединение имеет состояние 1. Открытое соединение имеет состояние 0.
Состояния реле и соединения
| C - S1 состояние соединения | C - S2 состояние соединения | Состояние реле |
|---|---|---|
| 1 | 0 | Обесточенный |
| 0 | 1 | Энергичный |
| 0 | 0 | Разомкнутая схема |
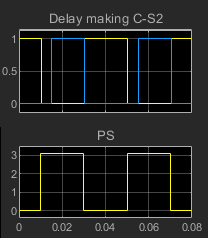
Задержки для создания и разрыва соединений можно задать в настройках Mechanical. Таблица показывает, как задержки шагового и тормозного времени влияют на соединения между контактами S1 и S2 и общим контактом, C.
| Mechanical настройки | Состояние реле | C - S1 состояние соединения | C - S2 состояние соединения | Результаты с C - S1 в Желтом и C - S2 в Синем | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Обесточенный | 1 | 0 |
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
| Обесточенный | 1 | 0 |
| ||||||||||
| Энергичный | 1, 0 | 1 | ||||||||||||
| Десергированный | 0, 1 | 0 |
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
| Десергированный | 1 | 1, 0 |
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
| Десергированный | 1 | 0 |
| ||||||||||
| Энергичный | 0 | 0, 1 |
Блок обеспечивает пять типов отказов:
C-S1 stuck closed
C-S2 stuck closed
C open circuit (no path to S1 or S2)
Degraded contact resistance
Winding failed open circuit. Этот тип отказа доступен только для варианта электрического управления.
Каждый тип отказа может вступить в эффект только при превышении порога для временного или поведенческого триггера.
C - S1 застрявший замкнутый отказ происходит, если общий контакт, C, становится механически, электрически или химически прилипшим к нормально замкнутому контакту, S1. Причины этого типа отказа включают:
Контактная сварка, возможно, из-за входного тока или тока обрыва, который превышает номинальное или нагрузочное короткое замыкание.
Механические повреждения.
Износ изоляции.
Индуктивное напряжение.
Таблица показывает состояние отказа для C - S1 застрявшего замкнутого отказа.
| Связь | Государство |
|---|---|
| C – S1 | 1 |
| C – S2 | 0 |
A C - S1 застрявший замкнутый временный отказ может возникнуть только, если время симуляции превышает временной порог, такой что
где:
t - время симуляции.
tth_t - заданное значение для параметра Simulation time after which contactors can stick.
A C - S1 застрявший закрытый поведенческий отказ может возникнуть только в том случае, если ток нагрузки превышает текущий порог в течение периода времени, который превышает временной порог поведенческого триггера. То есть поведенческий сбой может возникнуть только в том случае, если:
и
где:
iload - ток нагрузки.
ith - заданное значение для параметра Maximum permissible load current.
ti>i_th время превышения текущего порога.
tth_b - заданное значение для параметра Time to fail when exceeding current.
Когда превышены пороги временного или поведенческого отказа, если C - S1 есть:
Закрытый - C - S1 остается закрытым для остальной части симуляции.
Откройте - C - S1 отказ не вступает в эффект, если реле не станет обесточенным, а C - S1 соединение не закроется. После закрытия C - S1 связь остается закрытой для остальной части симуляции.
C - S2 застрявший замкнутый отказ происходит, если общий контакт, C, становится механически, электрически или химически прилипшим к нормально замкнутому контакту, S2. Причины этого типа отказа включают:
Контактная сварка, возможно, из-за входного тока или тока обрыва, который превышает номинальное или нагрузочное короткое замыкание.
Механические повреждения.
Износ изоляции.
Таблица показывает состояние отказа для C - S2 застрявшего замкнутого отказа.
| Связь | Государство |
|---|---|
| C – S1 | 0 |
| C – S2 | 1 |
A C - S2 застрявший замкнутый временный отказ может возникнуть только в том случае, если время симуляции превышает временной порог, так что:
где:
t - время симуляции.
tth_t - заданное значение для параметра Simulation time after which contactors can stick.
A C - S2 застрявший закрытый поведенческий отказ может возникнуть только в том случае, если ток нагрузки превышает текущий порог в течение периода времени, который превышает временной порог поведенческого триггера. То есть поведенческий сбой может возникнуть только в том случае, если:
и
где:
iload - ток нагрузки.
ith - заданное значение для параметра Maximum permissible load current.
ti>i_th время превышения текущего порога.
tth_b - заданное значение для параметра Time to fail when exceeding current.
Когда превышены пороги временного или поведенческого отказа, если C - S2 есть:
Закрытый - C - S2 остается закрытым для остальной части симуляции.
Open - The C - S2 отказ не вступает в эффект, если реле не становится под напряжением, а C - S2 соединение не закроется. После закрытия C - S2 связь остается закрытой для остальной части симуляции.
Отказ C разомкнутой цепи (нет пути к S1 или S2) возникает, если общий контакт, C, механически застревает в открытом положении. Этот тип отказа может произойти, если:
Происходит повреждение или ухудшение контакта.
Разъем переключателя механически застревает в середине реле.
Таблица показывает неисправное состояние для C отказа разомкнутой цепи (нет пути к S1 или S2).
| Связь | Государство |
|---|---|
| C – S1 | 0 |
| C – S2 | 0 |
Временный отказ C разомкнутой схемы может возникнуть только, если время симуляции превышает временной порог, такой что
где:
t - время симуляции.
tth_t - заданное значение для параметра Simulation time after which C can be open circuit.
C поведенческий отказ разомкнутой схемы может возникнуть только в том случае, если ток нагрузки превышает текущий порог в течение периода времени, который превышает временной порог поведенческого триггера. То есть поведенческий сбой может возникнуть только в том случае, если:
и
где:
iload - ток нагрузки.
ith - заданное значение для параметра Maximum permissible load current.
ti>i_th - период времени, в течение которого превышается текущий порог.
tth_b - заданное значение для параметра Time to fail when exceeding current.
При превышении порога временного отказа, если:
Реле находится в разомкнутом состоянии, то есть одно соединение разорвано, а другое еще не выполнено, реле остается открытым для остальной части симуляции.
Соединение C - S1 или C - S2 закрыто, отказ не вступает в эффект, если реле не включено или обесточено, а закрытое соединение не разорвано. Если связь разорвана, реле становится разомкнутой схемой и остается открытым для остальной части симуляции.
При превышении порогов поведенческого отказа, если:
Реле находится в разомкнутом состоянии, то есть одно соединение разорвано, а другое еще не выполнено, реле остается открытым для остальной части симуляции.
Соединение C - S1 или C - S2 закрыто, состояние реле немедленно становится разомкнутой схемой и остается разомкнутой схемой для остальной части симуляции.
Причины нарушения контактного сопротивления включают:
Вызванные чрезмерным использованием условия перегрузки. Высокие входные токи и напряжения могут вызвать условия перегрузки, так же как и чрезмерное переключение реле. Условия перегрузки в конечном счете запускают электрическую арматуру, которая генерирует тепло, которое ухудшает контактный материал.
Химическое загрязнение, которое препятствует операции контактов реле. Загрязняющие вещества, которые могут включать пленки окисления или посторонние частицы, имеют тенденцию к получению высоких или нестабильных показаний контактного сопротивления.
Окончание срока службы реле.
Таблица показывает неисправное состояние при повреждении контактного сопротивления.
| Связь | Государство |
|---|---|
| C – S1 | 0 или 1. Контактное сопротивление ухудшается. |
| C – S2 | 0 или 1. Контактное сопротивление ухудшается. |
Временный отказ ухудшенного контактного сопротивления может возникнуть только, если время симуляции превышает временной порог, такой что
где:
t - время симуляции.
tth_t - заданное значение для параметра Simulation time for fault event.
Деградированные контактные сопротивления S1 и S2:
где:
rcontact_fault_s1 - окончательное значение искаженного S1 контактного сопротивления.
rcontact_fault_s2 - окончательное значение искаженного S2 контактного сопротивления.
rcontact - нереализованное S1 и S2 контактное сопротивление.
Нарушение поведения с ухудшенным контактным сопротивлением может возникнуть только в том случае, если ток нагрузки превышает текущий порог в течение периода времени, который превышает временной порог поведенческого триггера. То есть поведенческий сбой может возникнуть только в том случае, если:
и
где:
iload - ток нагрузки.
ith - заданное значение для параметра Maximum permissible load current.
ti1>i_th - период времени, в течение которого превышается текущий порог для C-S1 соединения.
tth_b - заданное значение для параметра Time to fail when exceeding current.
Для отказа, вызванного поведением, если непрерывно в течение временного интервала tth_b,
где:
iS1-C является общим контактом для нормально замкнутого контакта, C - S1, тока.
ith - заданное значение для параметра Maximum permissible load current.
tth_b - заданное значение для параметра Time to fail when exceeding current.
rcontact_fault_s1 - окончательное значение искаженного S1 контактного сопротивления.
rcontact - неупорядоченное S1 контактное сопротивление.
τ является заданным значением для параметра Time constant for degraded contact resistance.
Аналогично, для C - S2 соединения, если
и
затем деградированное контактное сопротивление составляет:
где:
iS2-C является общим контактом для нормально замкнутого контакта, C - S2, тока.
rcontact_fault_s2 - окончательное значение искаженного S2 контактного сопротивления
Когда временный порог ошибки превышен, и для C - S1 и для C - S2 связи, сопротивление контакта немедленно ухудшено и остается ухудшенным для остальной части симуляции.
Когда пороги поведенческого отказа превышены для C - S1, с точки зрения iS1-C, сопротивление для C - S1 соединения ухудшается после заданного значения для параметра Time to fail when exceeding current и остается ухудшенным для остальной части симуляции.
Когда пороги поведенческого отказа превышены для C - S2, с точки зрения iS2-C, сопротивление для C - S2 соединения ухудшается после заданного значения для параметра Time to fail when exceeding current и остается ухудшенным для остальной части симуляции.
Отказ обмотки разомкнутой цепи доступен только для варианта электрического управления. Разомкнутая схема в обмотке обмотки может вызвать этот тип отказа.
Таблица показывает состояние отказа обмотки при отказе разомкнутой цепи.
| Связь | Государство |
|---|---|
| C – S1 | 1 |
| C – S2 | 0 |
Временный отказ обмотки при отказе разомкнутой цепи может возникнуть только в том случае, если время симуляции превышает временной порог, так что
где:
t - время симуляции.
tth_t - заданное значение для параметра Simulation time for fault event.
Для временного отказа реле переключается в зависимости от тока обмотки, который аппроксимируется как:
где:
L - индуктивность обмотки.
R - сопротивление обмотки.
i - обмотка тока.
vwinding - напряжение на обмотке.
tth_t - заданное значение для параметра Simulation time for fault event.
τ - заданное значение для параметра Time constant for winding open circuit transition.
Нарушение поведения обмотки разомкнутой цепи может возникнуть только в том случае, если выполнено одно из следующих условий:
Ток обмотки превышает текущий порог в течение периода времени, который превышает поведенческий порог времени триггера.
Напряжение обмотки превышает порог напряжения в несколько раз, что превышает порог количества перегрузок напряжения.
То есть поведенческий сбой может возникнуть только в том случае, если:
а затем
где:
iwinding - обмотка тока.
ith - заданное значение для параметра Maximum permissible winding current.
ti>i_th время превышения текущего порога.
tth_b - заданное значение для параметра Time to fail when exceeding current.
или если:
а затем
где:
vwinding - напряжение обмотки.
vth - заданное значение для параметра Maximum permissible winding voltage.
Nv>v_th - это количество превышений порога напряжения.
Nth - заданное значение для параметра Number of events to fail when exceeding voltage.
Если пороги временного или поведенческого отказа превышены, C - S1 остается закрытым для остальной части симуляции
Для поведенческих сбоев, если порог time to fail when exceeding the current больше, чем время между событиями переключения, отказ не запускается, потому что накопленное тепло не подходит для плавления или разрыва контактов или обмоток.
Задержки питания и обесточивания могут отличаться, но задержка питания должна быть больше или равной задержке обесточивания.
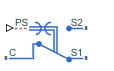
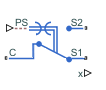
Тип, видимость и расположение портов блока зависят от того, как вы конфигурируете эти параметры в Main настройках:
Control port - Выберите между входным портом физического сигнала, PS или портами электрического сохранения, + и -, для управления реле.
State port - Установите видимость для выходного порта физического сигнала состояния реле, x.
Common port - Установите местоположение общего порта, C, относительно контактных портов S1 и S2.
| Control port | State port | Common port | Блок |
|---|---|---|---|
PS | Hidden | Adjacent to switch ports |
|
Adjacent to switch ports |
| ||
Visible | Across from switch ports |
| |
Across from switch ports |
| ||
Electrical | Hidden | Не применяется |
|
Visible | Не применяется |
|