Токовый контроллер с внутренней модуляцией ширины импульса для коммутируемых реактивных машин
Simscape / Электрический / Контроль / Контроль SRM
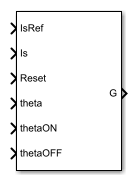
Блок SRM Current Controller with PWM Generation выполняет пропорционально-интегральное управление током в дискретном времени (PI) для блока Switched Reluctance Machine (SRM). Блок включает модуляцию ширины импульса (PWM).
Рисунок показывает структуру конвертера для SRM.
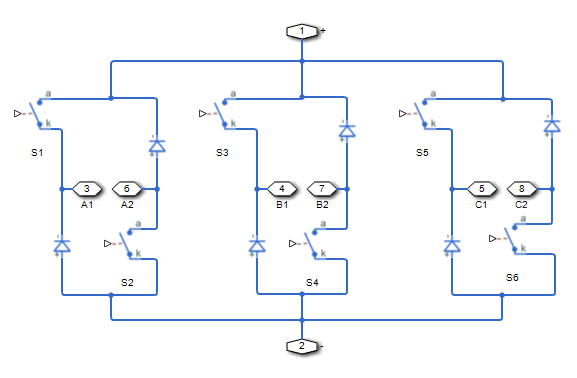
Как показано рисунки, сигнал генерации ШИМ предназначен для высокоскоростных коммутационных устройств.
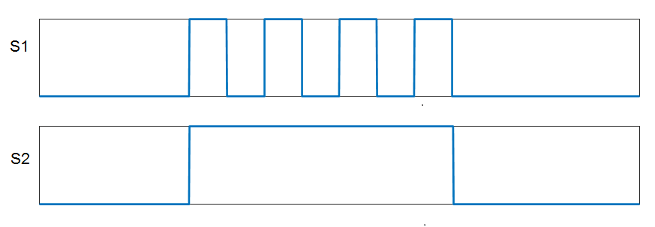
Когда управляющий сигнал больше, чем значение счетчика несущей, генератор ШИМ выводит 1. В противном случае выводится значение 0.
Чтобы определить коэффициент заполнения, блок реализует управление током ПИ в исходной системе координат ротора в соответствии с этим уравнением.
Где:
D - коэффициент заполнения.
Kp - пропорциональная составляющая.
Ki - интегральная составляющая.
Ts является шагом расчета.
Is_ref - ссылочный ток.
Is - измеренный ток.
Чтобы получить сигналы управления для трех фаз, блок затем умножает коэффициент заполнения на сигналы коммутации. Получившиеся три сигнала управления нормированы в течение интервала [0, 1].
[1] Саха, Н. и С. Панда. «Регулирование скорости с уменьшением пульсации крутящего момента переключаемого реактивного двигателя методом гибридного многих оптимизирующих связей гравитационного поиска». Инженерная наука и техника. Том 20 (2017): 909-921.
SRM Commutation Logic | SRM Current Controller | SRM Hysteresis Current Controller | Switched Reluctance Machine

