Трехфазная переключаемая реактивная машина
Simscape/Электрический/Электромеханический/Реактивные & Шаговый
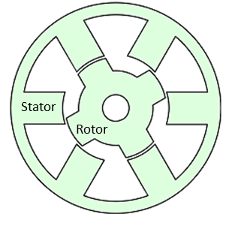
Блок Switched Reluctance Machine представляет трехфазную переключенную реактивную машину (SRM). Статор имеет три пары полюсов, несущих три обмотки мотора, а ротор имеет несколько немагнитных полюсов. Двигатель создает крутящий момент путем возбуждения пары полюсов статора, создания силы на ближайшие полюсы ротора и тяги их к выравниванию. Схема показывает конструкцию мотора.
Выберите эту машину в своем приложении, чтобы воспользоваться следующими свойствами:
Низкая стоимость
Относительно безопасные выходящие из строя токи
Робастность к высокотемпературной операции
Высокое отношение крутящего момента к инерции
Используйте этот блок для моделирования SRM с использованием легко измеряемых или оцениваемых параметров. Чтобы смоделировать SRM с использованием данных КЭМ, см. "Коммутируемый реактивный двигатель", параметризованный с данными КЭМ ".
Угол штриха ротора для трехфазной машины,
где:
θst - камень угла.
Nr - количество полюсов ротора.
Производительность крутящего момента, β, одного полюса ротора,
Математическая модель для переключаемой реактивной машины (SRM) является сильно нелинейной из-за влияния магнитного насыщения на кривую потокосцепления с углом λ (θph). Фаза напряжения для SRM
где:
vph - напряжение на фазу.
Rs - сопротивление статора на фазу.
iph - ток на фазу.
λph - редактирование потока на фазу.
θph - угол на фазу.
Переписывание фазы уравнения напряжения в терминах частных производных приводит к этому уравнению:
Переходная индуктивность определяется как
или более просто как
Обратная электродвижущая сила определяется как
Подстановка этих членов в переписанное уравнение напряжения приводит к этому уравнению напряжения:
Применение формулы совместной энергии к уравнениям для крутящего момента,
и энергия,
приводит к интегральному уравнению, которое задает мгновенный крутящий момент на фазу, то есть
Интегрирование по фазам приводит это уравнение, которое задает полный мгновенный крутящий момент для трехфазного SRM:
Уравнение для движения
где:
J - инерция ротора.
ω - механическая скорость вращения.
T - крутящий момент ротора. Для блока Switched Reluctance Machine крутящий момент течет от корпуса машины (порт C блока) к ротору машины (порт R блока).
TL - крутящий момент нагрузки.
J - инерция ротора.
Bm - демпфирование ротора.
Для высокоточного моделирования и разработки управления используйте эмпирические данные и вычисление конечного элемента, чтобы определить кривую редактирования с точки зрения тока и угла, то есть
Для низкоточного моделирования можно также аппроксимировать кривую с помощью аналитических методов. Один из таких методов [2] использует эту экспоненциальную функцию:
где:
λsat - редактирование насыщенного потока.
f (θr) получают расширением Фурье.
Для расширения Фурье используйте первые два четных условия этого уравнения:
где a > b,
и
Кривая редактирования аппроксимируется на основе параметрических и геометрических данных:
где L0 - ненасыщенная индуктивность.
Эффекты насыщения более заметны, когда продукта тока и ненасыщенной индуктивности приближаются к значению редактирования насыщенного потока. Задайте это значение с помощью параметра Saturated flux linkage.
Дифференцирование уравнения потока затем дает индуктивность обмотки:
Ненасыщенная индуктивность изменяется между минимальным и максимальным значением. Минимальное значение происходит, когда полюс ротора находится непосредственно между двумя полюсами статора. Максимум происходит, когда полюс ротора выровнен по оси с полюсом статора. Между этими двумя точками блок линейно аппроксимирует ненасыщенную индуктивность как функцию от угла ротора. Этот рисунок показывает ненасыщенную индуктивность, когда полюс ротора проходит над полюсом статора.
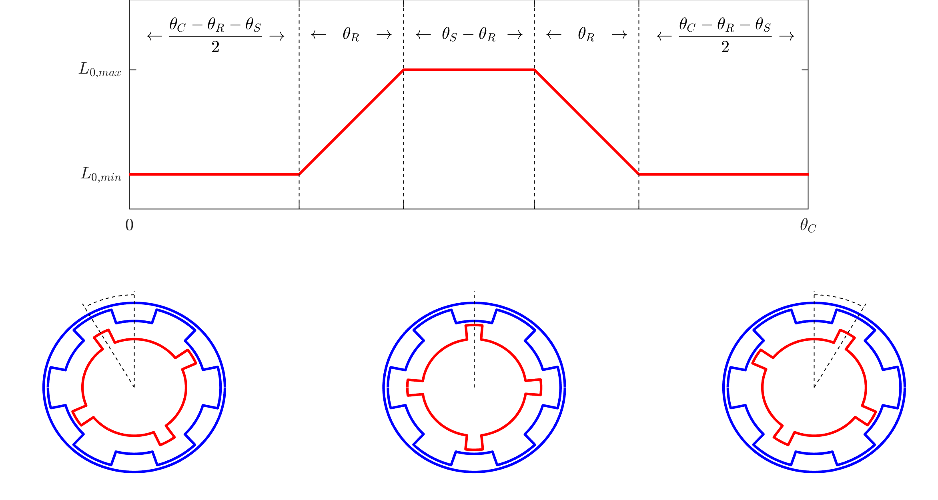
На рисунке:
θR соответствует углу, субтактному полюсу ротора. Установите его с помощью параметра Angle subtended by each rotor pole.
θS соответствует углу, субтравмированному полюсом статора. Установите его с помощью параметра Angle subtended by each stator pole.
θC соответствует углу, субтравмированному этим полным циклом, определяемому 2π/2n, где n - количество пар полюсов статора.
Блок обеспечивает четыре варианта моделирования. Чтобы выбрать нужный вариант, щелкните правой кнопкой мыши блок в модели. В контекстном меню выберите Simscape > Block choices, а затем один из следующих вариантов:
Composite three-phase ports | No thermal port - Блок содержит составные трехфазные электрические порты, сопоставленные с обмотками статора, но не содержит тепловых портов. Этот вариант является вариантом по умолчанию.
Expanded three-phase ports | No thermal port - Блок содержит расширенные электрические порты, сопоставленные с обмотками статора, но не содержит тепловых портов.
Composite three-phase ports | Show thermal port - Блок содержит составные трехфазные электрические порты, сопоставленные с обмотками статора, и четыре тепловых порта, по одному для каждой из трех обмоток и по одному для ротора.
Expanded three-phase ports | Show thermal port - Блок содержит расширенные электрические порты, сопоставленные с обмотками статора, и четыре тепловых порта, по одному для каждой из трех обмоток и по одному для ротора.
Используйте тепловые порты, чтобы симулировать эффекты сопротивления меди и потерь в железе, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
Выбор варианта теплового блока открывает тепловые параметры.
На практике эффекты магнитного ребра препятствуют принятию индуктивности трапеций, когда полюс ротора проходит над полюсом статора. Чтобы смоделировать эти эффекты и избежать разрывов градиента, которые препятствуют сходимости решателя, блок сглаживает ∂L0/∂θ градиента в точках перегиба. Чтобы изменить угол, над которым применяется это сглаживание, используйте параметр Angle over which flux gradient changes are smoothed.
Блок принимает, что нулевой угол ротора соответствует полюсу ротора, который идеально выровнен с a -фазой.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Болдея, И. и С. А. Насар. Электроприводы, второе издание. Нью-Йорк: CRC, 2005.
[2] Илик '-Спонг, М., Р. Марино, С. Пересада и Д. Тейлор. «Линейное управление с обратной связью переключаемых реактивных двигателей». Транзакции IEEE по автоматическому управлению. Том 32, № 5, 1987, с. 371-379.
BLDC | PMSM | Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Reluctance Machine


