Шестифазная синхронная машина
Simscape/Электрический/Электромеханический/Синхронный
Блок Synchronous Machine (Six-Phase) моделирует шестифазную синхронную машину, также известную как машина с двумя звездами.
Шестифазная синхронная машина имеет две группы обмоток статора: группу ABC и группу XYZ. Эти две группы имеют 30 степени фазовый сдвиг.
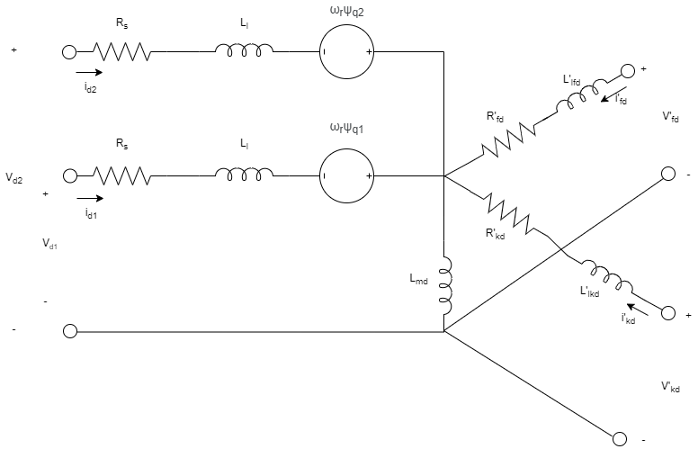
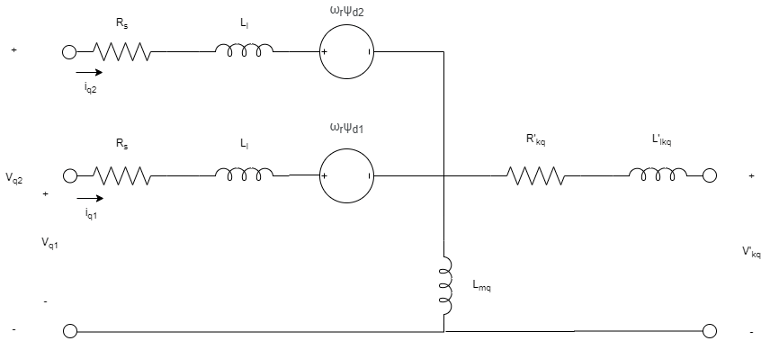
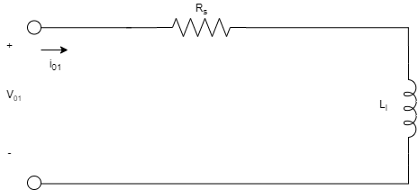
Эквивалентные схемы шестифазной синхронной машины для прямой оси, квадратурной оси и двух нулевых последовательностей:

Синхронные уравнения машины выражены относительно синхронно вращающейся системе координат, заданной как:
где:
θe - электрический угол ротора.
N - количество пар полюсов.
θr - механический угол ротора.
x_rotor_offset 0 если вы задаете электрический угол ротора относительно оси d, или -pi/2 если задан электрический угол ротора относительно оси q.
Два преобразования Park сопоставляют уравнения синхронной машины с вращающейся системой координат относительно электрического угла. Преобразование Park для первой группы обмоток статора, группы ABC, определяется:
Преобразование Park для второй группы обмоток статора, группы XYZ, определяется:
Преобразования Park используются, чтобы задать синхронные уравнения машины в относительных единицах.
Уравнения напряжения статора для группы ABC заданы:
где:
vd1, vq1 и v01 являются d -осью, q -осью и ABC-напряжениями статора с нулевой последовательностью, заданными как:
va, vb и vc являются напряжениями статора ABC, измеренными от порта ~ABC до нейтрального порта n1.
ωbase - базовая электрическая скорость в относительных единицах.
ψd1, ψq1 и ψ01 являются d -осью, q -осью и потоками статора с нулевой последовательностью для группы ABC.
ωr - скорость вращения ротора в относительных единицах.
Rs - сопротивление статора.
id1, iq1 и i01 являются d -осью, q -осью и токами статора ABC с нулевой последовательностью, заданными как:
ia, ib и ic являются токами статора ABC, протекающими от порта ~ABC к порту n1.
Уравнения напряжения статора для группы XYZ заданы:
где:
vd2, vq2 и v02 являются d осью, q осью и XYZ напряжениями статора с нулевой последовательностью, заданными как:
vx, vy и vz являются напряжениями статора XYZ, измеренными от порта ~XYZ до n2 нейтралей.
ψd2, ψq2 и ψ02 являются d -осью, q -осью и потоками статора с нулевой последовательностью для группы XYZ.
id2, iq2 и i02 являются d -осью, q -осью и XYZ-токами статора с нулевой последовательностью, заданными как:
ix, iy и iz являются токами статора XYZ, протекающими от порта ~XYZ к порту n2.
Уравнения напряжения ротора заданы:
где:
v'fd - напряжение обмотки возбуждения, относящееся к стороне статора.
v'kd и v'kq являются напряжениями обмотки демпфера dq осей, относящимися к стороне статора. Все они равны 0.
ψ'fd, ψ'kd и ψ'kq являются магнитными потоками, связывающими схему возбуждения, d обмотку демпфера оси и q обмотку демпфера.
R'fd, R'kd и R'kq - сопротивления цепи возбуждения ротора, d обмотка демпфера оси и обмотка демпфера оси q.
i'fd, i'kd и i'kq являются токами обмотки демпфера возбуждения и dq осей, относящимися к стороне статора.
Уравнения редактирования потока статора заданы:
где:
Ll - индуктивность утечек статора.
Lmd и Lmq являются взаимными индуктивностями оси d статора и оси q.
Уравнения редактирования потока ротора заданы:
где:
L'lfd - индуктивность обмотки возбуждения ротора.
L'lkd - индуктивность обмотки демпфера d оси ротора.
L'lkg - индуктивность обмотки демпфера q оси ротора.
Крутящий момент ротора определяется:
Настройки Variables позволяют вам задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Для этого блока настройки Variables видны только в том случае, если в настройках Initial Conditions параметр Initialization option установлен на Set targets for rotor angle and Park's transform variables.
[1] Kieferndorf, F., Burzanowska, H., Kanerva S., Sario P. «Моделирование гармоник на основе роторов в двухзвездочных, фазном поле, синхронных машинах». 2008 18-я Международная конференция по электрическим машинам: Vilamoura, 1-6.
[2] Burzanowska, H., Sario P, Stulz C., Joerg P. «Избыточный привод с непосредственным управлением крутящим моментом (DTC) и синхронной машиной с двумя звездами, симуляции и проверки». 2007 Европейская конференция по электронике и применениям: Aalborg,
Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Machine Model 1.0 | Synchronous Machine Model 2.1 | Synchronous Machine Round Rotor | Synchronous Machine Salient Pole
