Синхронная машина с цепью возбуждения и без демпфера
Simscape/Электрический/Электромеханический/Синхронный
Блок Synchronous Machine Model 1.0 использует упрощенную модель параметризации для синхронных машин. Используйте блок для моделирования синхронных машин с обмоткой возбуждения и без демпферов.
Рисунок показывает эквивалентную электрическую схему для обмоток статора и ротора.
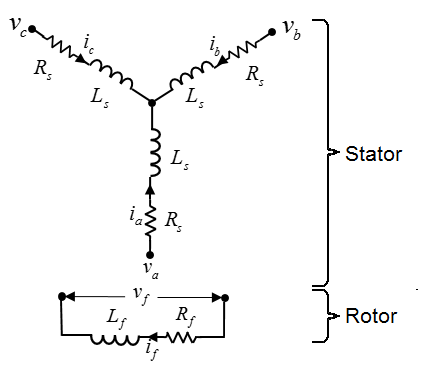
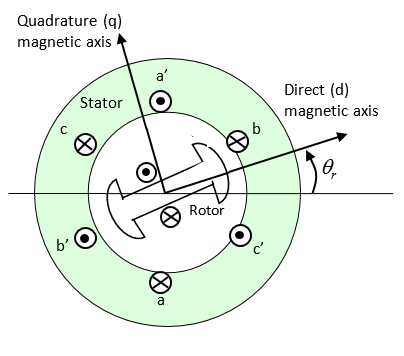
Схема показывает конструкцию мотора с одной полюсной парой на роторе. Для соглашения о осях, когда θr механического угла ротора равен нулю, потоки a-фазы и постоянных магнитов выравниваются. Блок поддерживает определение второй оси ротора, для которого механический угол ротора определяется как угол между a магнитной осью -фазы и осью q ротора -.
Напряжения на обмотках статора определяются
где:
va, vb и vc являются отдельными фазными напряжениями на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и - скорости изменения магнитного потока в каждой обмотке статора.
Напряжение на обмотке возбуждения выражается как
где:
vf - индивидуальное фазовое напряжение на обмотке возбуждения.
Rf - эквивалентное сопротивление обмотки возбуждения.
if - ток, протекающий в обмотке возбуждения.
- скорость изменения магнитного потока в обмотке возбуждения.
Постоянные магниты, обмотка возбуждения и три обмотки статора со звездной обмоткой способствуют потоку, связывающему каждую обмотку. Общий поток определяется
где:
ψa, ψb и ψc являются суммарными потоками, связывающими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндуктивностями обмоток статора.
Lab, Lac, Lba, Lbc, Lca, и Lcb являются взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками намагниченности, связывающими обмотки статора.
Lamf, Lbmf и Lcmf являются взаимными индуктивностями обмотки возбуждения.
Индуктивности в обмотках статора являются функциями электрического угла ротора и заданы как
где:
N - количество пар полюсов ротора.
θr - механический угол ротора.
θe - электрический угол ротора.
rotor offset 0 если вы задаете электрический угол ротора относительно оси D, или -pi/2 если вы задаете электрический угол ротора относительно оси q.
Ls является самоиндуктивностью статора на фазу. Это значение является средней индуктивностью каждой из обмоток статора.
Lm - индуктивность статора. Это значение является колебанием самоиндуктивности и взаимной индуктивности с изменением угла ротора.
Ms является взаимной индуктивностью статора. Это значение является средней взаимной индуктивностью между обмотками статора.
Намагниченный поток, связывающий обмотку, a-a’ является максимальным, когда θe = 0 ° и нули, когда θe = 90 °. Поэтому:
и
где:
Lmf - взаимная индуктивность якоря возбуждения.
ψf - поток, связывающий обмотку возбуждения.
Lf - индуктивность обмотки возбуждения.
- преобразование вектора Lmf, то есть,
Применение преобразования Park к определяющим уравнения электрическим блокам создает выражение для крутящего момента, которое не зависит от угла ротора.
Преобразование Парка определяется
Применение преобразования Park к первым двум электрическим определяющим уравнениям приводит к уравнениям, которые определяют поведение блоков:
и
где:
vd, vq и v0 являются d осью, q осью и напряжениями нулевой последовательности. Эти напряжения заданы как
id, iq и i0 являются d -осью, q -осью и токами нулевой последовательности, заданными как
Ld - индуктивность d оси статора. Ld = Ls + Ms + 3/2 <reservedrangesplaceholder0>.
ω - механическая скорость вращения.
Lq - индуктивность q оси статора. Lq = Ls + <reservedrangesplaceholder1> − 3/2 <reservedrangesplaceholder0>.
L0 - индуктивность нулевой последовательности статора. L0 = Ls – 2 Ms.
T - крутящий момент ротора. Для блока Synchronous Machine Model 1.0 крутящий момент течет от корпуса машины (порт C блока) к ротору машины (порт R блока).
J - инерция ротора.
TL - крутящий момент нагрузки.
Bm - демпфирование ротора.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток статора и по одному для ротора. Эти порты по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite three-phase ports | Show thermal port или Expanded three-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Thermal. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты сопротивления меди и потерь в железе, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Распределение потока синусоидально.
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Андерсон, П. М. Анализ неисправных степеней. IEEE Press, Power Systems Engineering, 1995.
[3] Retif, J. M., X. Lin-Shi, A. M. Llor, and F. Morand «New hybrid direct-torque control for a намотка ротора синхронной машины». 2004 IEEE 35-я ежегодная конференция специалистов по степени. Том 2 (2004): 1438-1442.
[4] Степень инженерное общество IEEE. IEEE Std 1110-2002. Руководство IEEE по методикам моделирования синхронных генераторов и применениям в анализе устойчивости системы степеней. Piscataway, NJ: IEEE, 2002.
BLDC | Switched Reluctance Machine | Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Machine Model 2.1 | Synchronous Machine Round Rotor | Synchronous Machine Salient Pole | Synchronous Reluctance Machine


