Шаговый двигатель с центральными отводами на двухфазных обмотках
Simscape/Электрический/Электромеханический/Реактивные & Шаговый
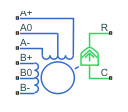
Блок Unipolar Stepper Motor представляет шаговый двигатель, который имеет центральные отводы на двух обмотках фазы. Токи обмотки и механический выход заданы следующими уравнениями:
где:
eA+ - это коэффициент противо-ЭДС, индуцированная через A+, чтобы A0 половинную обмотку.
eA- - это коэффициент противо-ЭДС, индуцированная через A-, чтобы A0 половинную обмотку.
eB+ - это коэффициент противо-ЭДС, индуцированная через B+, чтобы B0 половинную обмотку.
eB- - это коэффициент противо-ЭДС, индуцированная через B-, чтобы B0 половинную обмотку.
iA+ - ток, протекающий от A+ порта до центрального порта A0.
iA- - ток, протекающий от A- порта до центрального порта A0.
iB+ - ток, протекающий от B+ порта до центрального порта B0.
iB- - ток, протекающий от B- порта до центрального порта B0.
vA+ - напряжение в A+ порту относительно центрального порта A0.
vA- - напряжение в A- порту относительно центрального порта A0.
vB+ - напряжение в B+ порту относительно центрального порта B0.
vB- - напряжение в B- порту относительно центрального порта B0.
Km - крутящий момент двигателя константа.
Nr - количество зубьев на каждом из двух полюсов ротора. Параметр Full step size является (в/2 )/ Nr.
R - сопротивление половинной обмотки. Для примера это сопротивление между A+ и A0 портами.
L - индуктивность половинной обмотки. Для примера это индуктивность между A+ и A0 портами.
R m - сопротивление намагниченности .
B - вращательное демпфирование.
J - инерция.
ω - скорость ротора.
Θ - угол ротора.
Td - амплитуда крутящего момента заслонки.
Te - электрический крутящий момент.
Если начальный ротор равен нулю или какой-то кратный (в/2 )/ N r, ротор выравнивается с обмоткой А-фазы. Если положительный ток течет от A+ порта к центральному порту отвода A0, то шаговый порт действует, чтобы оставаться выровненным по отношению к A-фазе. Эквивалентно, положительный ток, протекающий от центрального порта отвода A0 к A- порту, также действует на ротор, чтобы оставаться совмещенным с A-фазой.
Блок Unipolar Stepper Motor производит положительный крутящий момент, действующий от механических портов C до R для любой из следующих последовательностей. Обе последовательности предполагают, что начальный угол ротора равен нулю или некоторому количеству, кратному (в/2 )/ N r.
| Последовательность | Центральные отводы, соединенные с землей | Центральные ответвления, соединенные с положительным питанием |
|---|---|---|
| 1 | Положительный ток от A+ до A0 | Положительный ток от A0 до A- |
| 2 | Положительный ток от B+ до B0 | Положительный ток от B0 до B- |
| 3 | Положительный ток от A- до A0 | Положительный ток от A0 до A- |
| 4 | Положительный ток от B- до B0 | Положительный ток от B0 до B- |
Если вы устанавливаете параметр Simulation mode равным Averaged, и для блока Unipolar Stepper Motor, и для блока Unipolar Stepper Motor Driver, который управляет им, тогда отдельные шаги не моделируются. Это может быть хорошим способом ускорить симуляцию. В режиме Averaged, в несскальзывающих условиях, двигатель и драйвер представлены линейной системой второго порядка, которая отслеживает заданную скорость шага. Требуемая скорость шага определяется непосредственно из напряжения на A+ и A-. Так, например, напряжение + 10 В на A+ и A- клеммах интерпретируется как требование скорости шага в десять шагов в секунду. Смотрите Unipolar Stepper Motor Driver страницы с описанием для получения дополнительной информации о том, как соединить Unipolar Stepper Motor Driver с вашим контроллером угла шага.
Усредненный режим включает в себя оценщик скольжения, чтобы предсказать, скатился ли бы шаговый двигатель, если бы вращался в режиме шаговой симуляции. Скольжение прогнозируется, если крутящий момент двигателя превышает значение параметров Vector of maximum torque values в течение более одного периода шага, причем период шага определяется из текущей потребности в скорости шага. При обнаружении скольжения симуляция будет продолжает или останавливаема с ошибкой, согласно Action on slipping значению параметров. Если вы выбираете действие, которое позволяет продолжить симуляцию, обратите внимание, что результаты симуляции могут быть неправильными: когда происходит скольжение, крутящий момент, генерируемый двигателем, обычно не будет максимальным доступным крутящим моментом; максимальный крутящий момент достигается, только если шаговый контроллер обнаруживает скольжение и соответственно регулирует команду скорости шага.
Динамика эквивалентной системы второго порядка определяется из значений, которые вы задаете для параметров Approximate total load inertia и Maximum step rate command. Важно, чтобы вы установили как можно более точные значения для этих параметров, так что команда step rate отслеживается, а блок не генерирует ложные скольжение предупреждений или ошибок.
Если вы запускаете двигатель в режиме Усредненного с необязательными тепловыми портами (см. «Тепловые порты»), то тепло добавляется к тепловым портам, принимая, что обмотки всегда питаются, даже когда команда скорости шага равна нулю. Блок производит регулировки на половину шага и на уменьшенный крутящий момент (и токи обмотки) на более высоких скоростях. Чтобы эти корректировки были правильными, Vector of maximum torque значения параметров должны быть правильными. Для половины шага, на нулевой скорости тепло, генерируемое блоком, является средним значением того, что генерируется, когда останавливается на половине шага и на полном шаге.
Если вы симулируете или предсказываете скольжение, MathWorks рекомендует провести некоторую валидацию запусков сравнения режимов Шагового и Усредненного перед использованием представления усредненной модели для симуляции исследований.
Блок имеет пять необязательных тепловых портов, по одному для каждой из четырех половинных обмоток и по одному для ротора. Эти порты по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты сопротивления меди и потерь в железе, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
Модель пренебрегает эффектами магнитного насыщения и любыми магнитными связями между фазами.
Когда вы устанавливаете флажок Start simulation from steady state в блоке Simscape™ Solver Configuration, этот блок не инициализирует значение Initial rotor angle между -
Все четыре половинки обмотки приняты идентичными, и поэтому имеют одинаковый температурный коэффициент сопротивления, альфа и ту же тепловую массу.
Чтобы использовать Усредненный режим, блок Однополярный шаговый двигатель должен быть непосредственно подключен к блоку Однополярный шаговый двигатель Драйвер, также работающему в Усредненном режиме.
Режим Averaged является приближением, и точного отслеживания шагов по сравнению с режимом Stepping ожидать не следует.
Обнаружение скольжения в режиме Averaged приблизительно и зависит от хорошей оценки инерции нагрузки и максимальной скорости шага. Неправильные значения могут привести к ложному обнаружению скольжения.
При симуляции скольжения в режиме Усредненного принято, что контроллер шагового двигателя настраивает команду скорости шага так, чтобы достичь максимально возможного крутящего момента.
[1] М. Бодсон, Дж. Н. Чиассон, Р. Т. Новотрак и Р. Б. Рековски. Высокопроизводительный нелинейный контроль обратной связи шагового двигателя с постоянными магнитами. Транзакции IEEE по технологии систем управления, том 1, № 1, март 1993 года.
[2] П. П. Акарнли. Шаговые двигатели: Руководство по современной теории и практике. Нью-Йорк: Перегрин, 1982.
[3] С. Е. Лышевски. Электромеханические системы, электрические машины и прикладная мехатроника. CRC, 1999.


