Траектория путевой точки в геодезических координатах
The geoTrajectory Системная object™ генерирует траектории на основе путевых точек в геодезических координатах. При создании системного объекта можно задать время прибытия, скорость и ориентацию в каждой путевой точке. The geoTrajectory Системный объект включает три системы координат. Для получения дополнительной информации смотрите Координатные системы координат в Geo Trajectory.
Чтобы сгенерировать земную траекторию путевой точки в геодезических координатах:
Создайте geoTrajectory Объекту и установите его свойства.
Вызовите объект, как если бы он был функцией.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
trajectory = geoTrajectory(Waypoints,TimeOfArrival)geoTrajectory Системный объект, trajectory, исходя из заданных геодезических точек пути, Waypointsи соответствующее время, TimeOfArrival.
trajectory = geoTrajectory(Waypoints,TimeOfArrival,Name,Value)Name к заданной Value. Неопределенные свойства и аргументы создания имеют значения по умолчанию или предполагаемые значения.
trajectory = geoTrajectory([10,10,1000;10,11,1100],[0,3600]) создает геодезическую траекторию путевой точки Системного объекта, geojectoryкоторый движется на одну степень долготы и на 100 метров высоты за один час.Аргументы создания являются свойствами, которые задаются во время создания Системного объекта и не могут быть изменены позже. Если вы явным образом не задаете значение аргумента создания, значение свойства выводится.
Можно задать Waypoints и TimeOfArrival как аргументы только для значения или пар "имя-значение".
[ выводит систему координат данных траектории на основе заданных аргументов и свойств создания, где positionLLA,orientation,velocity,acceleration,angularVelocity,ecef2ref] = trajectory()trajectory является geoTrajectory объект.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
geoTrajectory и посмотрите вверх положениеСоздайте geoTrajectory с начальным LLA в [15 15 0] и конечным LLA в [75 75 100]. Установите время рейса на десять часов. Дискретизируйте траекторию каждые 1000 секунд.
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);Вывод путевых точек LLA траектории.
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
⋮
Проверьте Декартовы точки пути траектории в системе координат ECEF с помощью lookupPose функция.
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');Визуализируйте результаты в системе координат ECEF.
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')

The geoTrajectory Системный объект включает три системы координат:
ECEF (Earth-Centered-Earth-Fixed) система координат
Локальные системы координат: локальные NED (North-East-Down) или ENU (East-North-Up) системы координат
Целевой каркас кузова
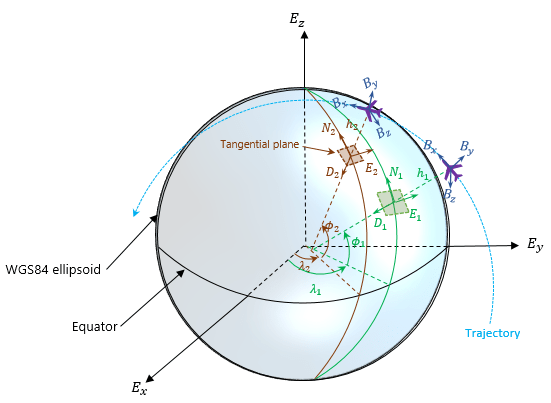
Рисунок показывает центрированную Землей траекторию с двумя подсвеченными путевыми точками. Рисунки используют локальную систему координат NED в качестве примера, но можно, безусловно, использовать локальную систему координат ENU. На рисунке,
<reservedrangesplaceholder5> <reservedrangesplaceholder4>, <reservedrangesplaceholder3> <reservedrangesplaceholder2> и <reservedrangesplaceholder1> <reservedrangesplaceholder0> - три оси системы координат ECEF, которая закреплена на Земле.
<reservedrangesplaceholder5> <reservedrangesplaceholder4> , <reservedrangesplaceholder3> <reservedrangesplaceholder2> и <reservedrangesplaceholder1> <reservedrangesplaceholder0> - три оси целевого каркаса кузова, который закреплен на цели.
N, E и D являются тремя осями локальной системы координат. Рисунок подчеркивает две местных системы координат NED, <reservedrangesplaceholder5> 1-<reservedrangesplaceholder4> 1-<reservedrangesplaceholder3> 1 и <reservedrangesplaceholder2> 2-<reservedrangesplaceholder1> 2-<reservedrangesplaceholder0> 2. Источником каждой локальной системы координат NED является точка поверхности Земли, соответствующая траектории пути, основанной на WGS84 эллипсоидной модели. Горизонтальная плоскость локальной NED-системы координат является касательной к поверхности WGS84 эллипсоидной модели.
λ и ϕ являются геодезической долготой и широтой, соответственно. Ориентация цели при помощи местной конвенции системы координат NED определена как вращение от местной системы координат NED до каркаса кузова цели, такого как вращение от <reservedrangesplaceholder8> 1-<reservedrangesplaceholder7> 1-<reservedrangesplaceholder6> 1 до <reservedrangesplaceholder5><reservedrangesplaceholder4>-<reservedrangesplaceholder3><reservedrangesplaceholder2>-<reservedrangesplaceholder1><reservedrangesplaceholder0>.