Чтобы использовать автонастройку ПИД-регулятора, сконфигурируйте и разверните один из блоков автоматической настройки ПИД, Closed-Loop PID Autotuner или Open-Loop PID Autotuner.
Блоки ПИД autotuner работают путем выполнения эксперимента по оценке частотной характеристики. Блоки вводят тестовые сигналы в ваш объект и настраивают коэффициенты ПИД на основе предполагаемой частотной характеристики.
Следующая принципиальная схема иллюстрирует, как блок автотуннера ПИД помещается в систему управления.
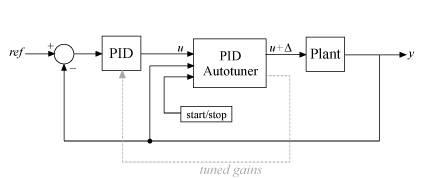
Пока процесс автоподстройки не начнется, блок автоподстройки ретранслирует управляющий сигнал непосредственно от u на вход объекта в u+Δu. В этом состоянии модуль не влияет на эффективность вашей системы.
Когда процесс автотунирования начинается, блок вводит тестовый сигнал в u out сбор входно-выходных данных объекта и оценка частотной характеристики в реальном времени.
Если вы используете блок Open-Loop PID Autotuner, блок открывает цикл обратной связи между u и u+Δu на время эксперимента по оценке. Он вводит во u+Δu суперпозицию синусоидальных сигналов на частотах [1/3, 1, 3, 10] ωc, где ωc ваша заданная целевая полоса для настройки. Для неинтегрирующих объектов блок может также ввести сигнал шага для оценки усиления постоянного тока объекта. Все тестовые сигналы вводятся поверх номинального входа объекта, которое является значением сигнала в u, когда начинается эксперимент.
Если вы используете блок Closed-Loop PID Autotuner, объект остается под контролем ПИД-регулятора с его текущими усилениями во время эксперимента. Настройка с обратной связью использует синусоидальные тестовые сигналы на частотах [1/10,1/3, 1, 3, 10] ωc.
Когда эксперимент заканчивается, блок использует оцененную частотную характеристику для вычисления коэффициентов ПИД. Алгоритм настройки направлен на балансировку эффективности и робастности при достижении заданных вами пропускной способности и запаса по фазе управления. Можно сконфигурировать логику, чтобы перенести настроенные усиления из блока в ПИД-регулятор, позволяя вам проверять эффективность с обратной связью в реальном времени.
Следующие шаги предоставляют общий обзор рабочего процесса для автонастройки ПИД-регулятора.
Включите блок PID autotuner в систему, как показано на принципиальной схеме.
Сконфигурируйте сигнал запуска/остановки, который управляет, когда эксперимент настройки начинается и заканчивается. Можно использовать этот сигнал для запуска процесса автонастройки ПИД-регулятора в любое время. Когда вы останавливаете эксперимент, блок возвращает настроенные коэффициенты ПИД.
Укажите параметры контроллера, такие как тип контроллера и целевая полоса пропускания для настройки.
Сконфигурируйте параметры эксперимента, такие как амплитуды возмущений, введенных во время эксперимента частотной характеристики.
Запустите процесс автотунирования, используя сигнал start/stop, и позволите ему работать достаточно долго, чтобы завершить эксперимент по оценке частотной характеристики.
Остановите процесс автообучения. Когда эксперимент останавливается, автотунер вычисляет и возвращает настроенные коэффициенты ПИД.
Перенесите настроенные усиления из блока в ПИД-регулятор. Затем можно подтвердить эффективность настроенного контроллера в Simulink® или в режиме реального времени.
Для получения подробной информации о выполнении каждого из этих шагов смотрите:
Closed-Loop PID Autotuner | Open-Loop PID Autotuner
