Этот пример показывает, как использовать PID Tuner для импорта измеренных данных измеренного отклика для оценки объекта.
Если у вас есть System Identification Toolbox™ программное обеспечение, можно использовать PID Tuner для оценки параметров линейной модели объекта управления на основе данных отклика временной области. PID Tuner затем настраивает ПИД-регулятор для полученной предполагаемой модели. Данные отклика могут быть либо измерены из вашей реальной системы, либо получены путем симуляции Simulink® модель. Оценка объекта особенно полезна, когда ваша модель Simulink не может быть линеаризирована или линеаризируется до нуля. Для идентификации объекта необходимо задать конечное значение для времени остановки модели Simulink.
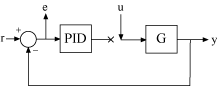
Когда вы импортируете данные отклика, PID Tuner принимает, что ваши измеренные данные представляют объект, соединенный с ПИД-регулятором в цикл отрицательной обратной связи. Другими словами, PID Tuner принимает следующую структуру для вашей системы. PID Tuner принимает, что вы ввели входной сигнал в u и измерил отклик системы в y, как показано.
Можно импортировать данные отклика, хранящиеся в MATLAB® рабочая область как числовой массив, a timeseries объект, или iddata (System Identification Toolbox) объект. Для импорта данных отклика:
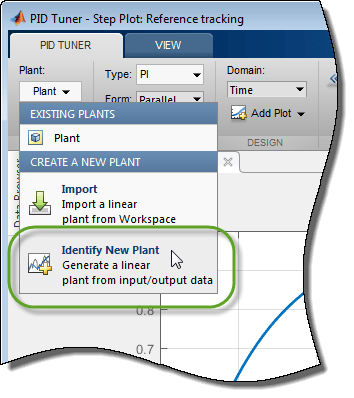
В PID Tuner, на вкладке PID Tuner, в меню Plant, выберите Identify New Plant.
На вкладке Plant Identification нажмите![]() Get I/O data. Выберите тип измеренного отклика данных. Для примера, если вы измерили реакцию вашего объекта на шаг входа, выберите Step Response. Чтобы импортировать ответ вашей системы на произвольный стимул, выберите Arbitrary I/O Data.
Get I/O data. Выберите тип измеренного отклика данных. Для примера, если вы измерили реакцию вашего объекта на шаг входа, выберите Step Response. Чтобы импортировать ответ вашей системы на произвольный стимул, выберите Arbitrary I/O Data.
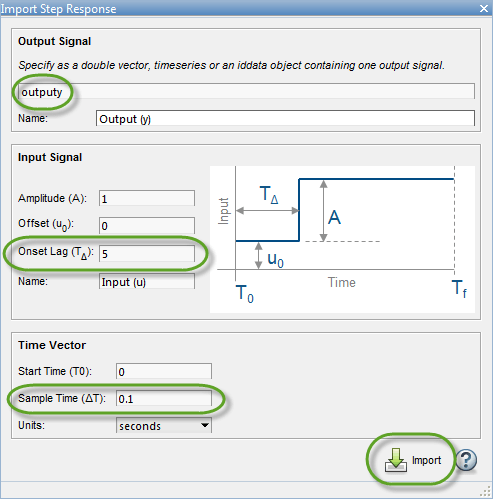
В диалоговом окне Импорт отклика введите информацию о данных отклика. Для примера переходной характеристики данные, хранящиеся в переменной outputy и каждые 0,1 с:
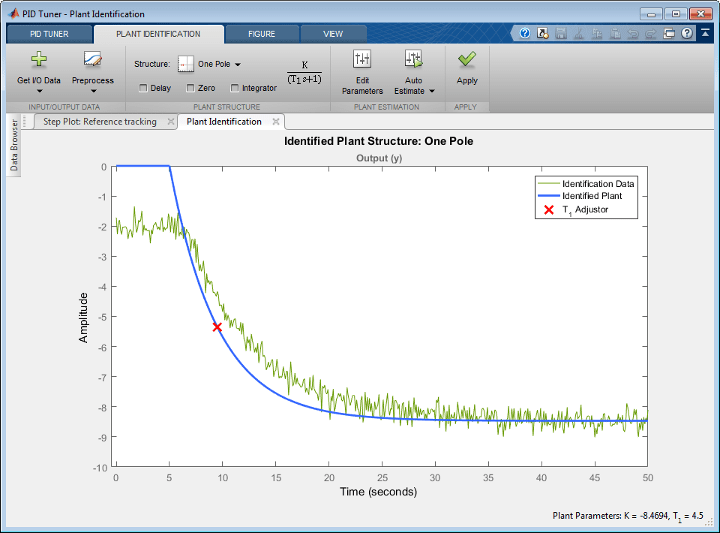
Нажмите![]() Import. Откроется вкладка Plant Identification, отображающая данные отклика и ответ исходного предполагаемого объекта.
Import. Откроется вкладка Plant Identification, отображающая данные отклика и ответ исходного предполагаемого объекта.
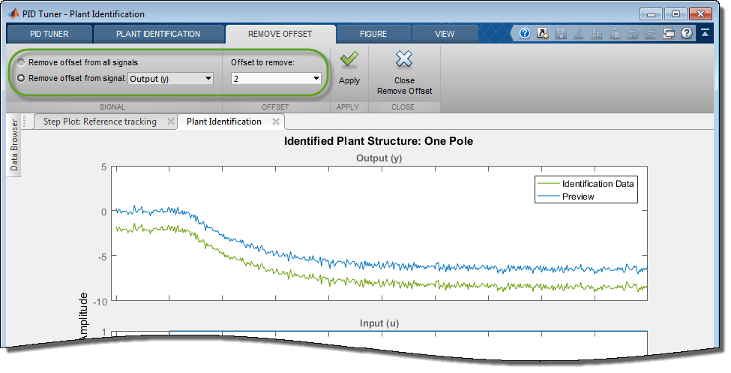
В зависимости от качества и функций данных отклика, вы можете выполнить некоторую предварительную обработку данных, чтобы улучшить предполагаемые результаты объекта. Меню Preprocess предоставляет вам несколько опции предварительной обработки данных отклика, таких как удаление смещений, фильтрация или извлечение на подмножестве данных. В частности, когда данные отклика имеют смещение, важно, чтобы хорошие результаты идентификации удаляли смещение.
На вкладке Plant Identification нажмите ![]() Preprocess и выберите опцию предварительной обработки, которую вы хотите использовать. Откроется вкладка с рисунком, на которой отображаются исходные и предварительно обработанные данные. Используйте опции на вкладке, чтобы задать параметры предварительной обработки.
Preprocess и выберите опцию предварительной обработки, которую вы хотите использовать. Откроется вкладка с рисунком, на которой отображаются исходные и предварительно обработанные данные. Используйте опции на вкладке, чтобы задать параметры предварительной обработки.
(Для получения дополнительной информации об опциях предварительной обработки см. раздел «Обработка данных предварительной обработки».)
Когда вы удовлетворены предварительно обработанным сигналом, нажмите![]() Update, чтобы сохранить изменение в сигнале. Щелкните, чтобы вернуться
Update, чтобы сохранить изменение в сигнале. Щелкните, чтобы вернуться![]() на вкладку Plant Identification.
на вкладку Plant Identification.
PID Tuner автоматически настраивает параметры объекта управления, чтобы создать новое начальное предположение для объекта на основе предварительно обработанного сигнала отклика.
Теперь можно настроить структуру и параметры предполагаемого объекта для получения предполагаемой линейной модели объекта управления для настройки ПИД. Для получения дополнительной информации см. Интерактивная оценка объекта из измеренных или Симулированный отклик данных.
