Когда вы запускаете свой Simulink® модель с использованием коэффициентов ПИД, вычисленных по PID Tuner, выход симуляции отличается от графика PID Tuner отклика.
Существует несколько причин, по которым моделируемая модель может отличаться от графика PID Tuner отклика. Если моделируемый результат соответствует требованиям проекта (несмотря на отличие от PID Tuner отклика), вам не нужно дорабатывать проект дальше. Если моделируемый результат не соответствует требованиям проекта, см. «Не удается найти приемлемую разработку ПИД в моделируемой модели».
Некоторые причины различий между моделируемым и PID Tuner откликами включают:
Сигналы опорных сигналов или нарушения порядка в вашей модели Simulink отличаются от сигналов шага, которые PID Tuner использует. Если вам нужны сигналы шага, чтобы оценить эффективность ПИД-регулятора в вашей модели, измените опорные сигналы в вашей модели на сигналы шага.
Структура вашей модели отличается от структуры цикла, для которой PID Tuner проекты. PID Tuner принимает строение цикла, показанную на следующем рисунке.
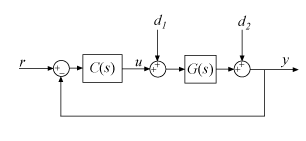
Как показано на рисунке, PID Tuner проектирует ПИД-контроллер в канале с прямой связью контура обратной связи с коэффициентом усиления. Если ваша модель Simulink отличается от этой структуры или вводит сигнал нарушения порядка в другом месте, ваша симулированный отклик отличается от PID Tuner характеристики.
Вы включили нелинейные функции в блоке PID Controller в модели, такие как пределы насыщения или антиокружительная схема. PID Tuner игнорирует нелинейные настройки в блоке PID Controller, что может привести к тому, что PID Tuner даст отличный ответ от симуляции.
Ваша модель Simulink имеет сильные нелинейности на объекте, что делает линеаризацию недействительной в полной рабочей области значений симуляции.
Вы выбрали рабочую точку, используя PID Tuner, которая отличается от рабочей точки, сохраненной в модели. В этом случае PID Tuner спроектировал контроллер для другой рабочей точки, чем рабочая точка, которая начинает симуляцию. Симулируйте свою модель с помощью PID Tuner рабочей точки путем инициализации вашей модели Simulink с этой рабочей точкой. См. Моделирование модели Simulink в конкретной рабочей точке.
Discrete PID Controller | Discrete PID Controller (2DOF) | PID Controller | PID Controller (2DOF)
