Подвеска твердой оси для нескольких осей
Динамика автомобиля Blockset/Подвеска
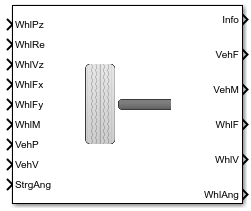
Блок Solid Axle Suspension реализует монолитную подвеску для нескольких осей с несколькими дорожками на ось.
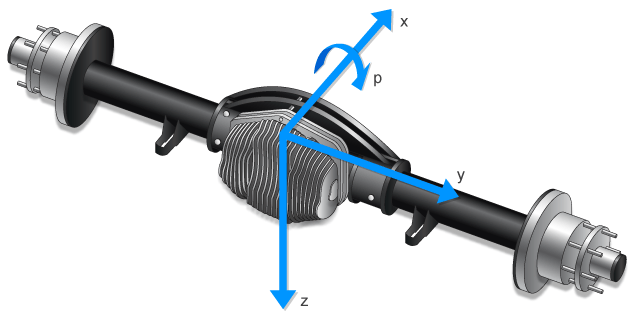
Блок моделирует податливость подвески, демпфирование и геометрические эффекты как функции положения и скорости дорожки с параметрами податливости и демпфирования оси. Используя положение и скорость дорожки, блок вычисляет положение вертикальной дорожки и силы подвески на транспортном средстве и колесе. Блок использует Z-down (заданный в J670 SAE) и систему координат оси твердого тела. Система координат твердой оси, показанная здесь, выровнена с системой координат Z-вниз транспортного средства, с осью X в направлении движения вперед транспортного средства.
| Для каждого | Вы можете задать |
|---|---|
|
Ось |
|
|
След |
|
Блок содержит накопительные энергию пружинные элементы и рассеивающие энергию демпферные элементы. Блок также сохраняет энергию через угловое ускорение крена оси и центр оси масс вертикального и бокового ускорения.
В этой таблице представлены параметры блоков настройки для транспортного средства с:
Две оси.
По две дорожки на ось.
Вход угла поворота для обеих трасс на передней оси.
| Параметр | Настройка |
|---|---|
| Number of axles, NumAxl |
|
Number of tracks by axle, NumTracksByAxl |
|
| Steered axle enable by axle, StrgEnByAxl |
|
Блок использует линейную пружину и демпфер, чтобы смоделировать вертикальные динамические эффекты системы подвески на транспортном средстве и колесе. В частности, блок:
|
Использование |
Вычислять |
|---|---|
|
|
Чтобы вычислить динамику оси, блок реализует эти уравнения. Блок пренебрегает эффектами:
Боковая и продольная поступательная скорость.
Скорость вращения вокруг вертикальной и боковой осей.
Сетчатая вертикальная сила на центре масс оси является суммой сил колеса и подвески, действующих на ось.
Чистый момент вокруг оси крена подвески твердой оси учитывает координаты точки подвески и дорожки.
Параметры блоков обеспечивают координаты точек подвеса и дорожки.
Блок использует углы Эйлера, чтобы преобразовать перемещение дорожки и подвески, скорости и ускорения в систему координат транспортного средства.
Чтобы вычислить силы подвески, приложенные к транспортному средству, блок реализует это уравнение.
Силы подвески и моменты, приложенные к транспортному средству, равны силам подвески и моментам, приложенным к колесу.
Чтобы вычислить вертикальную силу, приложенную к подвеске в местоположении дорожки, блок реализует жесткую пружину-демпфер.
В уравнениях используются эти переменные.
| Fwza,t, Mwza,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwxa,t, Mwxa,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwya,t, Mwya,t | Сила подвески и момент, приложенные к колесу на оси |
| Fvza,t, Mvza,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvxa,t, Mvxa,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvya,t, Mvya,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fz0a | Вертикальная подвеска предварительного поджатия пружины примененная к колесам на оси |
| kza | Вертикальный коэффициент упругости, применяемое к рельсам на оси |
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| cza | Вертикальная демпфирующая константа, применяемая к рельсам на оси |
| Rewa,t | Эффективный радиус колеса для |
| Fzhstopa,t | Вертикальное усилие упора на оси |
| Fzaswya,t | Вертикальное противовыбросовое усилие на оси |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
| xva,t, ẋva,t | Перемещение и скорость транспортного средства на оси |
| xwa,t, ẋwa,t | Перемещение пути и скорость на оси |
| yva,t, ẏva,t | Перемещение и скорость транспортного средства на оси |
| ywa,t, ẏwa,t | Перемещение пути и скорость на оси |
| Ha,t | Высота подвески на оси |
| Rewa,t | Эффективный радиус колеса на оси a, отслеживать t |
Сила обратной связи жесткого упора, Fzhstopa,t, которую применяет блок, зависит от того, сжимается или растягивается подвеска. Блок применяет силу:
При сжатии, когда подвеска сжата больше, чем максимальное расстояние, заданное параметром Suspension maximum height, Hmax.
В расширении, когда расширение подвески больше максимального расширения, заданного параметром Suspension maximum height, Hmax.
Чтобы вычислить силу, блок использует жесткость, основанную на гиперболическом тангенсе и экспоненциальном масштабировании.
Чтобы вычислить углы развала, литья и носка, блок использует линейные функции высоты подвески и угла поворота руля.
В уравнениях используются эти переменные.
| ξa,t |
Угол развала колеса на оси |
| ηa,t |
Угол наклона колеса на оси |
| ζa,t |
Угол наклона колеса на оси |
| ξ0a, η0a, ζ0a |
Номинальная ось подвески с углами развала, литья и носка, соответственно, при нулевом угле поворота |
| mhcambera, mhcastera, mhtoea |
Крен, литье и углы наклона носка, соответственно, в зависимости от высоты подвески для |
| mcambersteera, mcastersteera, mtoesteera |
Камбер, кастер и углы наклона носка, соответственно, от угла наклона поворота руля для |
| mhsteera |
Угол рулевого управления от наклона вертикальной силы для осевых |
| δsteera,t |
Вход угла поворота для |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеи на оси |
Вы также можете вводить углы поворота для дорожек. Чтобы вычислить углы поворота колес, блок смещает входные углы поворота с линейной функцией высоты подвески.
В уравнении используются эти переменные.
| mtoesteera |
Ось |
| mhsteera |
Ось |
| mhtoea |
Ось |
| δwhlsteera,t |
Угол поворота колеса для |
| δsteera,t |
Вход угла поворота для |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеи на оси |
Блок вычисляет эти характеристики подвески для каждой оси, a, трек, t.
| Вычисление | Уравнение |
|---|---|
Рассеянная степень, Psuspa,t |
|
Поглощенная энергия, Esuspa,t |
|
Высота подвески, Ha,t |
|
Расстояние от центра колеса до интерфейса шина/дорога |
|
В уравнениях используются эти переменные.
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| Rewa,t | Ось |
| Fz0a | Вертикальная подвеска предварительного поджатия пружины примененная к колесам на оси |
| zwtra,t | Расстояние от центра колеса до интерфейса шина/дорога, вдоль фиксированной оси Z автомобиля |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. J670 SAE. Warrendale, PA: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика аппарата и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
Solid Axle Suspension - Coil Spring | Solid Axle Suspension - Leaf Spring | Solid Axle Suspension - Mapped
